使用 AUTOTUNE 自动调整¶
为飞机获得一套良好的滚转/螺距调整参数对于实现稳定、精确的飞行至关重要。为此,强烈建议您使用下文所述的自动调整系统。
自动调整功能的作用¶
自动调整模式是一种飞行模式,其飞行方式与 FBWA 相同,但使用飞行员输入的飞行姿态变化来学习滚转和俯仰调整的关键值。因此,飞行员使用发射机模式开关切换到自动调整模式,然后驾驶飞机飞行几分钟。在飞行过程中,飞行员需要尽可能多地输入急剧的姿态变化,以便自动调整代码能够了解飞机的反应。
设置自动调整¶
要将飞机设置为 AUTOTUNE 模式,您需要将 AUTOTUNE 模式选择为可通过发射机上的飞行模式开关选择的飞行模式之一。
您还可以在 "自动调整 "模式下对偏航轴进行自动调整,以控制偏航率。 ACRO 模式 通过设置 启用偏航速率 = 1 和 ACRO_YAW_RATE 该值等于或小于飞行器的偏航率能力(典型值为 90 度/秒)。当然,前提是飞行器有偏航控制面(例如,只有升降舵的飞翼就没有)。
备注
您可以在大多数稳定飞行模式下进行自动调整,例如 CRUISE 或 FBWA/B、LOITER,甚至在自动飞行任务航段期间(如果 搅拌棒 启用),通过 RCx_OPTION 开关设置为 107。
警告
如果您没有飞行员引导模式的飞行经验,或者在监控 GCS 的调整进度信息时很难手动驾驶大型垂直起降固定翼飞行器。在这种情况下,比较安全的做法是在执行重复的固定航线任务(例如矩形环)时,在自动模式下或在LOITERING模式下进行调试,使用上述遥控辅助开关启用自动调试,同时无需持续引导飞行器飞行。
"这款" AUTOTUNE_AXES 位掩码用于选择在自动调整时将对哪些轴进行调整。默认为滚动、俯仰和偏航。
您还应该通过设置 AUTOTUNE_LEVEL 参数。参数 AUTOTUNE_LEVEL 参数可控制飞行稳定调整的强度。默认设置为 6 级,可产生中等音调,适合初级到中级飞行员。如果您是一名经验丰富的飞行员,则可以选择 7 级,这将使飞行稳定调整更加敏锐(姿态变化更快)。在使用较低的级别进行初步调试之前,不建议使用 7 级以上的级别。只有经验丰富的飞行员才能使用 8 级以上的级别。
备注
如果启用了偏航率控制器,在自动调整模式下转弯将需要使用方向舵,而不仅仅是副翼输入。请勿启用 启用偏航速率 如果没有方向舵。
自动调整功能可对 FF(前馈)、P、I 和 D 各项进行调整。 AUTOTUNE_LEVEL决定了飞行稳定调整过程中使用的最大/目标回转速率,以及从期望姿态角到要求角速率的增益 ( ptch2srv_tconst 和 RLL2SRV_TCONST).
重要的是要根据飞机实际能达到的速率来设置适当的级别。特别是,对于翼展较大的慢速飞机(如滑翔机)来说,6 级滚转率可能过大。这些飞机的最大滚转速率通常为每秒 30 - 40 度,因此应使用 2 级或 3 级。参见 AUTOTUNE_LEVEL 设置 的费率。但 8 级可能适合 2 公斤以下级别的轻型泡沫飞机。
备注
的 ptch2srv_rmax_up, ptch2srv_rmax_dn和 RLL2SRV_RMAX 在正常飞行时,也应根据飞行器的性能适当设置速率。
您还需要确保机身的所有基本设置正确无误。特别是要确保所有表面反转正确,并为最小空速设置一个合理的值。只有当您的飞行速度超过在 "自动调整 "中设置的最小空速时,自动调整才会发挥作用。 最小风量 参数。如果您没有空速传感器,则仍会使用该值以及其他传感器估算的空速。此外,请确保您已完成遥控校准,因为自动调整功能只有在您可以完全控制发射杆运动时才会起作用。
此外,ArduPilot 还将自动调整增益与空速(测量值或估计值(如果未使用空速传感器))的比例,以补偿控制面效果与速度的关系。其标称中心速度为 标定速度 并应设置为用于调整的大致速度,即典型的巡航速度。一旦设置了这个速度,就不要再更改了,因为这会直接影响增益并破坏调校。
其他需要检查的事项:
如果安装了空速传感器,请确保其正常工作并已校准。请参见 空速校准.
- 检查您的重心,确保重心符合飞机手册的规定。一般来说,重心稍高一些会更安全。
机头重于机尾重。
检查表面修整。建议使用 伺服自动微调 选项的文档后,再阅读该选项。
确保您的故障安全设置设置正确。试着在飞机着地的情况下关闭发射机(拆除螺旋桨或确保安全),然后检查飞机的反应。
设立一个集合点,以便在必要时在家里以外的安全地点进行 RTL
确保 PTCH_RATE_SMAX 和 RLL_RATE_SMAX 根据舵机速度适当设置参数。参见 极限循环检测.如果设置过低,则会影响飞行稳定调整。
如果这是一个 垂直起降和 ins_gyro_filter 为了更好地进行 VTOL 调整和使用带阻滤波器,AUTOTUNE 可能会将固定翼控制环滤波器设置得过高,从而导致固定翼调整效果较差。在这种情况下 自动调整选项 可用于防止自动调整功能将其作为调整的一部分进行更改。
自动飞行¶
完成所有设置后,您就可以开始在自动调整模式下飞行了。您既可以在 AUTOTUNE 模式下起飞,也可以在其他模式下起飞,并在爬升到一定高度后切换到 AUTOTUNE 模式。
启用自动调整模式后,会发生几件事:
自动调整系统会立即为您的滚转和俯仰最大速率以及角度误差设置一些值,以满足速率增益的要求。这些值取决于 AUTOTUNE_LEVEL
自动调整系统将监控您所要求的滚转率和俯仰率(由发射机摇杆动作决定)。当要求的滚转率或俯仰率(或偏航率,如果 启用偏航速率 = 1)超过参考文献设定的最大飞行稳定调整目标轴速率的 40%:AUTOTUNE_LEVEL<AUTOTUNE_LEVEL>;自动调整系统将利用飞机的响应来学习调整值。因此,需要在每个方向上以中等至最大的杆偏转稍作停顿,然后急速移动杆。
一旦完成一个轴的调整,自动调整系统将保存 P 和 D 参数。退出自动调整模式后,将保存 FF 和 I 值。在轴调整过程中切换出自动调整模式将使 PID 值恢复为原始值。
如果一开始使用的是滚转和俯仰的默认参数,您可能会发现飞机在第一次进入自动调整时相当迟钝。随着调整的深入,您会发现这种情况会有所改善。确保您的飞行区域有足够的空间进行长距离慢速转弯。
成功进行自动调整的关键是用发射杆输入快速的滚动或俯仰动作。最好一次只做一个轴的调整,尽管所有被调整的轴都在同时进行调整,因此调整信息可能偶尔会交错出现。
因此,在每个轴上依次快速移动摇杆,并在每次偏转时稍作停顿,直到 GCS 或 OSD 上报告飞行稳定调整完成信息。
如果最初的调整值过低,那么在自动调整模式下飞行时,您会发现飞机的响应速度逐渐变快。
停止增加 AUTOTUNE_LEVEL 在连续的自动调整过程中,当获得理想的手感和响应速度时,会出现振荡,或者在某个轴上变得 "抽搐"。
不要过早停止¶
如果无法使用 GCS 或 OSD 监控调整进度,建议每个轴至少快速移动 20 次,最好更多。在所有轴都完成调试之前停止会导致飞机飞行不良。在 "自动调整 "模式下继续飞行并练习操纵杆,直到您认为飞机飞行良好为止。
调试轻巧灵活的飞机¶
非常轻巧灵活的飞机可能无法完成调试,或导致调试时出现小幅振荡,通常是在俯仰轴上,因为飞机惯性小。在这种情况下,进行以下操作并重新尝试自动调整可能会有所帮助:
提高主循环速率、 调度循环速率 调至 "200"(赫兹),并设置 ONESHOT_MASK 如果它们能够进行 200Hz 更新......大多数数字舵机都能做到这一点......请检查它们在移动时是否过热)。这样可以提高控制更新率,减少延迟,增加相位余量,从而消除微小振荡,提高精确度。
设置 ins_gyro_filter 到 "40"(赫兹)截止频率,并增加 PTCH_RATE_FLTT 和 RLL_RATE_FLTT 到 "20"(赫兹),以减少延迟并增加相位裕度。
ACRO 模式 YAW 速率控制器¶
从 4.2 版开始,ArduPilot 提供了使用 YAW 速率控制器的选项,其行为方式与俯仰和滚动控制器相同,但 YAW 轴由方向舵操纵杆控制,前提是载具具有方向舵控制面。
要启用此功能,请设置 启用偏航速率 为 1。启用后 ACRO_YAW_RATE 参数可用于调整 ACRO 模式下舵杆全偏转时所需的最大偏航率。
该控制器可以与俯仰轴和滚动轴一样进行自动调整,并在相同的会话中使用方向舵控制杆产生自动调整所需的快速偏航。
备注
当启用该控制器进行自动调整时,滚动输入也将导致偏航输出,从而使偏航控制器激活时的转弯更加协调。这通常会导致偏航控制器与滚动控制器同时调整,但不一定在滚动调整结束时完成偏航调整。此外,对于偏航能力较强的载具,在滚转调节初期可能会出现过度使用方向舵的情况,直到调节开始。
自动调整 0 级¶
这是一个特殊级别,不会改变速率或时间常数(即像 RLL2SRV_RMAX 或 ptch2srv_tconst),但会根据这些参数的当前值调整 FF/P/I/D。当音高在较低值时不稳定时,这可能很有用。 AUTOTUNE_LEVEL 例如,您可以将 ROLL(滚动)轴的值设置为比 pitch(音高)轴更大的值,然后进行调整,重新优化该配置的 FF/P/I/D 值。您可以将滚动轴的值设置为比俯仰轴更大的值,然后进行调整,重新优化该配置的 FF/P/I/D 值。
完成曲调¶
使用自动飞行稳定调整功能学习了合理的飞行稳定调整参数后,就应该通过手动飞行稳定调整其他一些关键参数来完成飞行稳定调整。
大多数机型需要的参数是
NAVL1_PERIOD:默认值为 25,这是一个非常保守的值,旨在应对调试不良的机身。它控制飞机在自动模式(如 AUTO、RTL 和 LOITER)下的转弯幅度。大多数飞机应使用更低的数值。一旦您成功完成了滚转和俯仰值的自动调整,您就应该降低 NAVL1_PERIOD 如果尚未调整,请将其调到 18。如果要调整到更高水平,则应在自动模式下执行一次矩形任务,然后调整 NAVL1_PERIOD 每次下调 1 个,直到飞机以您满意的速度转弯,并且在飞行中不会 "摆尾"。
PTCH2SRV_RLL:该参数控制转弯时增加多少升降舵以保持机头水平。许多飞机需要对该参数进行微调,默认值为 1.0。要查看是否需要调整该值,您应该在 FBWA 模式下,通过握住副翼杆使其用力向上移,同时不提供任何升降舵输入,来保持一个紧密的圆。如果飞机高度增加,则应降低 PTCH2SRV_RLL 小幅度降低(最初尝试降低到 0.95)。如果飞机在盘旋时降低了高度,则尝试提高 PTCH2SRV_RLL 少量(最初尝试 1.05)。如果需要超过 1.3 或低于 0.8,那么您的设置可能存在问题(如重心不正确、推力线不良、空速校准不良、俯仰环调整过软或指南针误差过大)。您应该尝试修复设置。
还有许多其他参数可以提高飞机的性能,但这些参数是大多数人需要的。请阅读正常的手动调整文档以了解更多信息。
自动调整记录¶
自动调整的进度记录在数据闪存日志中。如果您试图调试自动调整或在论坛上发布有关自动调整的信息,请将数据闪存日志包括在内。
下面是一个典型的自动调整会话日志文件:
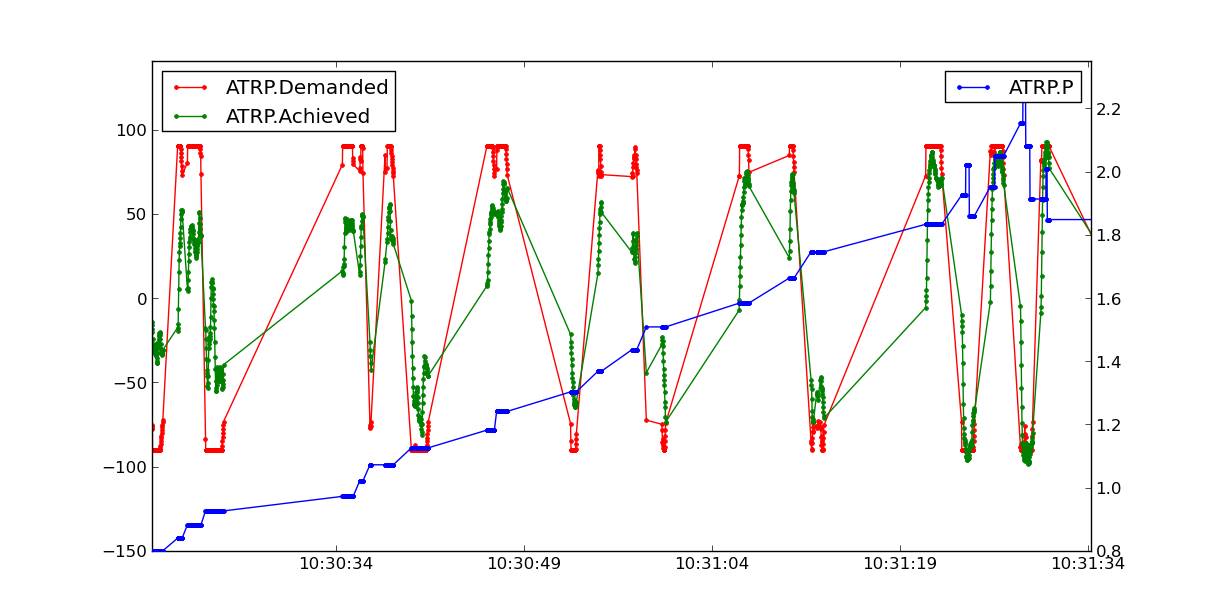
ATRP 信息有一个 "类型 "字段,显示正在记录的自动调整类型。类型值为 0 表示滚动调整,值为 1 表示音高调整。绘制 ATRP 结果图时,应选择类型为 0 或 1 的数据(不能同时选择)。
ATRP.Demanded 字段是要求的姿态变化率(滚转率或俯仰率),单位为每秒度数。ATRP.Achieved 字段是飞机实际达到的姿态变化率。如上图所示,在自动调整开始时,由于调整增益太低,需求值远远高于实现值。随着调整的进行,需求值和实现值开始趋同。上图中的蓝线是 ATRP.P 值,即控制器的 P 增益。您可以看到它从 0.8 上升到最高的 2.2,然后略微回落到 1.85 左右。
您还会注意到,图表中存在间隙。这是因为飞行员没有要求较高的姿态变化率。自动调整系统只有在飞行员要求快速改变姿态(超过最大速率的 80%)时才会工作。
手动飞行稳定调整与自动飞行稳定调整¶
为了使 Plane 达到最佳性能,您可以进行手动调整,或许可以从自动调整的数值开始。自动调整系统是一个保守的系统,可以为大多数飞机获得合理的数值,但它并不是一个 "完美的调整器",如果投入时间和精力,手动调整可以获得更好的性能。但这需要使用和分析日志文件结果。
不过,我们仍然建议每个人一开始就使用 AUTOTUNE。正确调整飞机并非易事,AUTOTUNE 比绝大多数用户做得更好。因此,请先使用自动调整器,然后从自动调整器产生的结果开始探索手动调整指南,如果您想更进一步的话。
手动增大 D 增益可以提高滚转和俯仰响应的准确性,并减少飞机受阵风和湍流的影响。通过小幅度增加增益直到飞机开始振荡,可以找到高性能调整的 D 增益最佳值。然后将增益值从导致振荡的值减半。使用此方法产生的振荡可能很大,因此除非您准备好手动控制,否则不要执行此步骤。建议在较低的油门设置和空速下进行 D 增益调整。
如果手动调整 I 增益,也会改变维持正确响应所需的 P 值,因此只建议高级用户调整 I 增益。
AUTOTUNE_LEVEL 设置¶
级别 |
速率 [度/秒] |
1 |
20 |
2 |
30 |
3 |
40 |
4 |
50 |
5 |
60 |
6(默认值) |
75 |
7 |
90 |
8 |
120 |
9 |
160 |
10 |
210 |
11 |
300 |
备注
如果正在调整,偏航率目标值始终为 90 度/秒