校准空速传感器¶
正确配置 空速传感器 可以大大提高飞机在以下情况下保持高度的能力 自动节流模式 (如 AUTO、CRUISE 和 FBWB),并大大提高自动着陆性能。它还能降低失速的几率。
同时,配置不正确的空速传感器会导致飞机坠毁,因此正确配置空速传感器至关重要!
飞行前检查¶
如果安装了空速传感器,则必须进行飞行前检查,以确保其正常工作,并确保其正确归零。
启动飞机上的(飞行)控制器后,应等待至少 1 分钟让电子设备预热,最好更长一些,然后对空速传感器进行飞行前校准。您的地面站软件应该有这样的菜单,通常称为 "飞行前校准"。您需要松松地盖住空速传感器,以防止风影响结果,然后按下按钮。校准需要几秒钟时间。
警告
在开机过程中,或在等待并按上述方法重新校准时,盖上气动导管非常重要。不准确的静态校准会导致报告的空速过高,导致自动油门控制模式使用非常低的油门,并可能导致坠机。
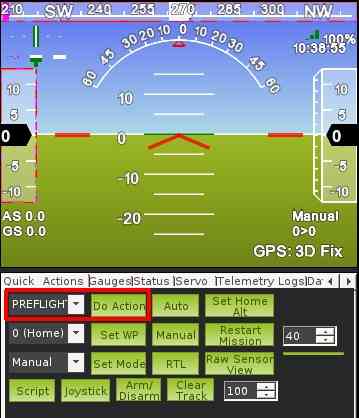
选择该操作将重新校准地面气压和空速传感器。
接下来,您应该在起飞前检查空速传感器是否正常工作。为此,您应向空速传感器吹气,并确保在您向传感器吹气时,HUD 上的 "AS "空速传感器值会上升。
校准空速传感器¶
"这款" ARSPD_RATIO 参数决定 ArduPilot 如何将空速传感器的压差映射为空速值。默认值约为 2.0,对于大多数使用模拟传感器的用户来说,应该能获得不错的结果。正确的值取决于您是否将空速传感器放置在飞机上,有些用户可能会发现他们需要通过更改以下参数来校准空速传感器 ARSPD_RATIO.您可以在地面站的(飞行)控制器配置页面中找到 "空速比 "设置。
调整 ARSPD_RATIO 可以使用自动校准功能自动校准,也可以手动校准。两种方法的操作步骤如下。
自动校准¶
转至Mission Planner地面站 => 配置/飞行稳定调整 => 完整参数列表,更改 ARSPD_AUTOCAL 为 1,然后单击 "写入参数 "将数值发送至(飞行)控制器。
起飞后进行 5 分钟的重复循环或环形位置悬停飞行。这可以在任何模式下完成,但如果(飞行)控制器已经调试得足够好,则可以通过让其在位置悬停或 RTL 模式下飞行 5 分钟来实现。在 ARSPD_RATIO 可以在飞行中通过Mission Planner地面站 => 配置/飞行稳定调整 => 完整参数列表并单击 "刷新参数 "来检查该值。请注意,当校准激活时,更新的 ARSPD_RATIO (飞行)控制器的非易失性存储器每两分钟才会保存一次该值,而且只有在该值与上次保存的值相比变化超过 5%时才会保存。
着陆,转到Mission Planner地面站 => 配置/飞行稳定调整 => 完整参数列表并更改 ARSPD_AUTOCAL 返回 0 以防止进一步更改。
在Mission Planner地面站 => CONFIG/TUNING => 完整参数列表中,单击 "刷新参数 "并检查 ARSPD_RATIO.通常它在 1.5 和 3.0 之间。如果不在这个范围内,并且您已经检查过是否有泄漏,那么如果可行,您应该考虑重新定位皮托管,以减少相邻机身、机翼等的气动干扰。
备注
计算会自动补偿海拔高度对空气密度的影响。
备注
如果在飞行过程中预计风速不会急剧变化,也不会飞越会导致风速估算不准确的地形(如陡峭的山丘或峡谷),则可以不考虑风速估算。 ARSPD_AUTOCAL 启用。但是,由于校准后的比率不应发生变化,因此强烈建议先进行校准飞行,然后再禁用。
警告
不要离开 ARSPD_AUTOCAL 可用于长时间的水平飞行。校准需要定期转弯以获得良好的估计值。如果长距离飞行而不转弯,就会产生很差的空速比,导致空速报告非常不正确,在某些极端情况下甚至会导致坠机。
警告
如果您更换或更换了皮托管,请重新设置 ARSPD_RATIO (默认值 = 2.0)并重新校准传感器。
备注
对于那些追求更高精度的用户,在步骤 2) 和步骤 3) 之间的 BARO_GND_TEMP 可设置为起飞位置的当前空气温度。默认情况下,校准算法使用开机时的电路板温度作为环境空气温度的近似值,但由于太阳能和电加热的原因,读数几乎总是偏高。如果在极端温度条件下运行,这一步骤可能是值得的。
手动校准¶
要手动确定正确的空速比,应在 FBWA 模式下进行试飞,步骤如下:
起飞并到达安全高度。对于大多数机型来说,100 米左右的高度就足够了
将副翼杆偏向一侧,开始稳定转弯
让飞机转两三圈
着陆并查看遥测日志
请地面站软件绘制您飞行的空速和地速值,放大您盘旋飞行的部分。您将得到如下图表:
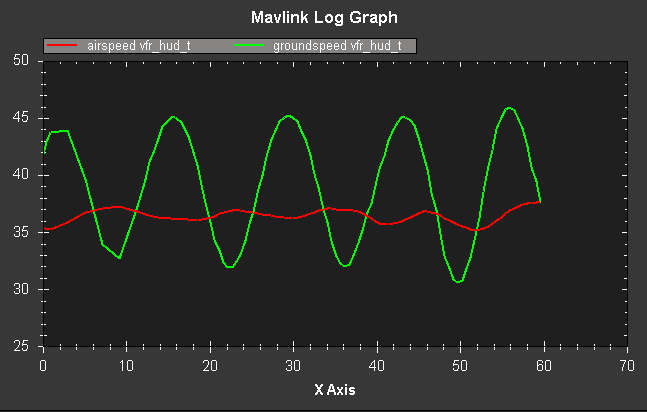
在这种情况下,您可以看到在盘旋时地面速度变化很大。这是因为在这次飞行中,有相当强的持续风速(在这种情况下约为 7 米/秒)。
现在看看平均空速值与平均地速的关系。在上图中,您可以看到平均空速比平均地速低一点点--在上图中,两个平均值之间的差距约为 2 米/秒。
计算新的空速比¶
根据上述图表,您可以使用该公式计算出新的空速比:
new_ratio = old_ratio*((average_airspeed + airspeed_increase)/average_airspeed)²
在哪里?
OLD_RATIO = 旧值 ARSPD_RATIO
NEW_RATIO = 新值 ARSPD_RATIO
AVERAGE_AIRSPEED = 测试期间获得的平均空速
AIRSPEED_INCREASE = 平均空速的增加量
例如,在上图中,我们看到平均空速为 36.5,我们希望将其提高 2,达到 38.5。旧的比率是 2.0。因此,我们可以计算出新的比率为
new_ratio = 2.0 * ((36.5 + 2) / 36.5)² = 2.23
调整后 ARSPD_RATIO 再做一次飞行,检查空速是否校准良好。不要忘记飞行前的检查!
关于高海拔地区的注意事项¶
在较高的海拔高度,真实空速和视在空速会开始出现偏差。上述校准程序假定真实空速和视在空速相同。如果您在海拔 2000 米或更高的高度飞行,则应考虑到两者之间的差异,并按照真实空速与视在空速之比,使视在空速低于平均地面速度。
在海拔 2000 米的高度,视在空速和真实空速之间的差值约为 10%,因此平均空速应低于平均地面速度约 10%。在海拔 4000 米处,这一比例上升到约 20%。海拔 5000 米时则为 30%。超过这个范围,请查阅飞机导航表。