臂前安全检查¶
ArduPilot 包含一整套上膛前安全检查,如果在运动前发现大量问题,包括校准、配置或传感器数据错误,将阻止飞行器上膛其推进系统。这些检查有助于防止碰撞或失控,但必要时也可以禁用其中一些检查。
警告
切勿禁用上膛检查(即 上膛检查 不 ="1",台架测试除外。在尝试飞行之前,请务必解决任何预上膛或上膛故障。否则可能导致飞行器丢失。
使用 GCS 识别哪项臂前检查失败¶
驾驶员将注意到上膛前检查失败,因为他/她将无法上膛载具,通知 LED(如果有)将闪烁黄色。要确定到底是哪项检查失败:
使用 USB 电缆将(飞行)控制器与地面站连接,或使用 USB 电缆将(飞行)控制器与地面站连接。 遥测.
确保 GCS 已与飞行器连接(即在 Mission Planner 上按右上角的 "连接 "按钮)。
打开无线电发射机并尝试对载具进行上膛(常规程序是使用油门向下、向右偏航或通过 RCx_OPTION 开关进行上膛)。
预臂检查失败的第一个原因将以红色显示在 HUD 窗口上
上膛前检查失败的信息也会在上膛时发送到 GCS,大约每 30 秒发送一次。如果您希望禁用此功能,只在上膛尝试失败时才发送信息,则可设置 上膛选项 位 1(值 1)。
留言 |
原因 |
解决方案 |
|---|---|---|
需要进行 3D Accel 校准 |
未进行加速度计校准 |
完成 加速度校准 |
校准 Accels 需要重新启动 |
加速校准后必须重启(飞行)控制器 |
重启(飞行)控制器 |
Accels 不一致 |
两个加速度计的不一致性为 0.75 米/秒/秒 |
重做 加速度校准.让(飞行)控制器预热并重新启动。如果故障继续,则更换(飞行)控制器 |
ADSB 内存不足 |
(飞行)控制器内存不足 |
禁用功能或更换为动力更强的(飞行)控制器 |
Accels 不健康 |
至少有一个加速度计没有提供数据 |
重新启动(飞行)控制器。如果故障继续,更换(飞行)控制器 |
AHRS:未使用配置的 AHRS 类型 |
EKF3 尚未准备就绪,载具正在使用 DCM |
如果在室内,请到室外。确保 GPS 锁定良好。检查 EKF 是否配置错误(请参阅 AHRS_EKF_TYPE) |
AHRS:等待回家 |
GPS 没有定位 |
如果在室内,请到室外。确保已完成指南针和加速度计校准。消除可能干扰 GPS 的射频源 |
空速 1 不健康 |
(飞行)控制器无法从传感器获取数据 |
检查物理连接和 配置 |
AP_Relay 不可用 |
降落伞配置错误 |
降落伞通过继电器控制,但缺少继电器功能。 定制服务器 可能使用过,重建时启用了继电器 |
拒绝辅助授权 |
外部系统不允许授权 |
检查外部授权系统 |
批量采样需要重新启动 |
批量采样功能需要重启(飞行)控制器 |
重启(飞行)控制器或检查 批量取样 配置 |
电池电量低于最低上膛容量 |
电池容量低于 BATT_ARM_MAH |
更换电池或调整 BATT_ARM_MAH |
电池电压低于最低上膛电压 |
电池电压低于 BATT_ARM_VOLT |
更换电池或调整 BATT_ARM_VOLT |
电池容量故障安全临界值 >= 低 |
电池故障保护配置错误 |
检查 BATT_LOW_MAH 高于 BATT_CRT_MAH |
电池临界容量故障保护 |
电池容量低于 BATT_CRT_MAH |
更换电池或调整 BATT_CRT_MAH |
电池临界电压故障保护 |
电池电压低于 BATT_CRT_VOLT |
更换电池或调整 BATT_CRT_VOLT |
电池容量不足故障保护 |
电池容量低于 BATT_LOW_MAH |
更换电池或调整 BATT_LOW_MAH |
电池低电压故障保护 |
电池电压低于 BATT_LOW_VOLT |
更换电池或调整 BATT_LOW_VOLT |
电池不健康 |
电池不提供数据 |
检查电池监控器的物理连接和 配置 |
电池电压故障安全临界值 >= 低 |
电池故障保护配置错误 |
检查 BATT_LOW_VOLT 高于 BATT_CRT_VOLT |
BendyRuler OA 需要重新启动 |
更改对象回避配置需要重启 |
重启(飞行)控制器。查看 物体避让配置 |
电路板 (Xv) 超出范围 4.3-5.8v |
电路板电压低于 BRD_VBUS_MIN 或过高 |
检查电源。如果通过 USB 供电,则插入电池或更换 USB 电缆 |
BTN_PINx=y 无效 |
按钮配置错误 |
BTNx_PIN 设置为无效值。检查 按钮设置说明 |
BTN_PINx=y, 设置 SERVOz_FUNCTION=-1 |
按钮配置错误 |
将 SERVOz_FUNCTION 设置为 -1 |
没有位置就无法检查集会 |
EKF 尚无位置估计 |
等待或移动到 GPS 接收更好的位置 |
检查围栏 |
栅栏功能初始化失败 |
重启(飞行)控制器 |
检查磁场 (xy diff:x>875) |
罗盘水平场强过大或过小 |
将载具远离环境中的金属。将指南针远离车架上的金属。 罗盘校准.禁用内部指南针。 |
检查磁场(z diff:x>875) |
罗盘垂直场强过大或过小 |
将载具远离环境中的金属。将指南针远离车架上的金属。 罗盘校准.禁用内部指南针。 |
检查磁场:X、最大 Y、最小 Z |
罗盘场强过大或过小 |
将载具远离环境中的金属。将指南针远离车架上的金属。 罗盘校准.禁用内部指南针。 |
滑道没有通道 |
降落伞配置错误 |
降落伞使用 PWM 控制,但未配置伺服输出功能(例如需要 SERVOx_FUNCTION = 27)。 降落伞安装说明 |
滑道没有继电器 |
降落伞配置错误 |
降落伞通过继电器控制,但未配置继电器输出。 降落伞安装说明 |
滑道释放 |
降落伞已发布 |
重启(飞行)控制器 |
罗盘校准后需要重新启动 |
罗盘校准后必须重新启动(飞行)控制器 |
重启(飞行)控制器 |
罗盘校准运行 |
罗盘校准正在运行 |
完成或取消 罗盘校准 |
指南针不健康 |
至少有一个指南针没有提供数据 |
检查罗盘与(飞行)控制器和 配置 |
罗盘偏置过高 |
指南针偏移参数过大 |
|
指南针不一致 |
两个罗盘角度或场强不一致 |
|
Dijkstra OA 需要重新启动 |
更改对象回避配置需要重启 |
重启(飞行)控制器。查看 物体避让配置 |
打开撤膛开关 |
解除警报辅助开关位于高位 |
将解除警报开关移至低位或检查 辅助功能 设置 |
下载日志 |
下载日志时不能上膛载具 |
等待下载日志、取消下载或重启(飞行)控制器 |
DroneCAN:重复节点 x.../y! |
DroneCAN 发现两台设备使用相同的节点 ID |
通过设置清除 DroneCAN DNS 服务器 can_d1_uc_option = 1 并重新启动 |
DroneCAN:访问存储失败! |
可能的硬件问题 |
重启(飞行)控制器 |
DroneCAN:添加节点 x 失败! |
DroneCAN 无法启动与设备的连接 |
检查传感器的物理连接和电源 |
DroneCAN:节点 x 不健康! |
DroneCAN 设备未提供数据 |
检查传感器的物理连接和电源 |
重复辅助开关选项 |
相同功能的两个辅助功能开关 |
检查 辅助功能 设置。检查 RCx_OPTION 参数值相同 |
EKF3 滚动/俯仰不一致 x 度 |
滚动角或俯仰角估计值不一致 |
通常是由于 EKF3 无法获得足够好的 GPS 精确度,但也可能是由于其他传感器产生错误。到室外等待或重启(飞行)控制器。 |
EKF3 等待 GPS 配置数据 |
自动 GPS 配置尚未完成 |
检查 GPS 连接和配置,尤其是在使用 DroneCAN GPS 的情况下 |
EKF3 偏航不一致 x 度 |
偏航角估计值不一致 |
等待或重启(飞行)控制器 |
打开 mission.stg 失败 |
从 SD 卡加载任务失败 |
检查 SD 卡。尝试将任务重新保存到 SD 卡 |
围栏需要定位 |
如果启用围栏,需要进行位置估算 |
等待或将载具移至视野开阔的地方。减少射频干扰源 |
FENCE_ALT_MAX < FENCE_ALT_MIN |
FENCE_ALT_MAX 必须大于 FENCE_ALT_MIN |
增加 FENCE_ALT_MAX 或以下 FENCE_ALT_MIN |
FENCE_MARGIN 小于 FENCE_RADIUS |
FENCE_MARGIN 必须大于 FENCE_RADIUS |
|
FENCE_MARGIN 过大 |
FENCE_ALT_MAX - FENCE_ALT_MIN < 2x FENCE_MARGIN |
减少 栅栏 之间的差额 FENCE_ALT_MAX 和 FENCE_ALT_MIN |
围栏已启用,但未选择 |
围栏已启用,但未定义 |
使用 FENCE_ENABLE 或 栅栏类型 或界定缺失的围栏 |
围栏无效 |
多边形围栏无效 |
检查多边形围栏是否有重叠线 |
FETtec:电机屏蔽无效 |
FETtec 配置错误 |
参见 FETtec 配置 |
FETtec:极数无效 x |
FETtec 配置错误 |
参见 FETtec 配置 |
FETtec:无 uart |
FETtec 配置错误 |
参见 FETtec 配置 |
FETtec:未初始化 |
FETtec ESC 无法与(飞行)控制器通信 |
参见 FETtec 配置 |
FETtec: x of y ESCs 没有运行 |
FETtec 电子调速器不转了 |
参见 FETtec 配置 |
FETtec:x 个电调未发送远程信号 |
FETtec ESC 无法与(飞行)控制器通信 |
参见 FETtec 配置 |
FFT 校准噪声 |
FFT 谐波带阻滤波分析未完成 |
等到 飞行中 FFT 分析 补充 |
FFT 配置 MAXHZ xHz > yHz |
FFT 谐波带阻滤波错误配置 |
参见 飞行中 FFT 谐波带阻滤波设置 补充 |
FFT 自检失败,最大误差 Hz |
FFT 谐波带阻滤波失败 |
参见 飞行中 FFT 谐波带阻滤波设置 补充 |
FFT 仍在分析 |
FFT 谐波带阻滤波分析未完成 |
等到 飞行中 FFT 分析 补充 |
FFT:校准 xHz/xHz/xHz |
FFT 谐波带阻滤波问题 |
参见 飞行中 FFT 谐波带阻滤波设置 补充 |
FFT:分辨率为 xHz,增加长度 |
FFT 谐波带阻滤波错误配置 |
参见 飞行中 FFT 谐波带阻滤波设置 补充 |
发电机/燃料电池:不健康 |
发电机/燃料电池无法与(飞行)控制器通信 |
检查 发电机/燃料电池配置 |
发电机/燃料电池无后台驱动程序 |
固件不包括选择信号发生器 |
使用 custom.ardupilot.org 利用所需生成器构建固件版本 |
GPS 和 AHRS 因 Xm 而异 |
GPS 和 EKF 定位至少相差 10 米 |
等待 GPS 质量改善。将载具移到视野开阔的地方。减少射频干扰源 |
不健康的 GPS 混合 |
至少有一个 GPS 没有提供良好的数据 |
将载具移至视野开阔的地方。减少射频干扰源。检查 GPS 混合配置 |
GPS 节点 x 未设置为实例 y |
DroneCan GPS 配置错误 |
|
GPS 位置相差 Xm |
两个 GPS 报告的位置相差 50 米或更多 |
等待 GPS 质量改善。将载具移到视野开阔的地方。减少射频干扰源 |
GPS x 仍在配置此 GPS |
自动 GPS 配置尚未完成 |
等待配置完成。检查 GPS 连接和配置,尤其是在使用 DroneCAN GPS 的情况下 |
GPS x:定位错误 |
GPS 无法很好地锁定 |
将载具移至视野开阔的地方。减少射频干扰源 |
GPS x:不健康 |
GPS 不提供数据 |
检查 GPS 与(飞行)控制器的物理连接,以及 配置 |
GPS x: 主要但 TYPE 0 |
主 GPS 未配置 |
检查 GPS_PRIMARY 并确认相应的 GPS1_TYPE 或 GPS2_TYPE 与所用 GPS 的类型相匹配 |
GPS x: 未找到 |
GPS 连接断开或配置不正确 |
检查 GPS 与(飞行)控制器的物理连接,以及 配置 |
GPSx 偏航不可用 |
已配置 GPS 偏航功能,但无法使用 |
移动到 GPS 接收更好的位置。检查 偏航/航向 GPS 配置 |
前后不一致的陀螺 |
两个陀螺仪至少不一致 5 度/秒 |
重新启动(飞行)控制器并保持载具静止,直至陀螺仪校准完成。让(飞行)控制器预热并重新启动。如果故障继续,更换(飞行)控制器 |
陀螺仪未校准 |
启动时正常运行的陀螺仪校准失败 |
重新启动(飞行)控制器并保持载具静止不动,直至陀螺仪校准完成 |
烤肉不健康 |
至少一个陀螺仪未提供数据 |
重新启动(飞行)控制器。如果故障继续,更换(飞行)控制器 |
硬件安全开关 |
硬件安全开关未按下 |
按下安全开关(通常在 GPS 顶部)或通过设置禁用 安全解除 归零并重新启动(飞行)控制器 |
加热器温度低 (x < 45) |
电路板加热器温度低于 BRD_HEAT_TARG |
等待电路板加热。可使用 BRD_HEAT_TARG |
在 OSD 菜单中 |
正在配置 OSD |
完成 OSD 配置。检查 OSD 配置 |
内部错误 0x%x l:%u %s |
发生内部错误 |
重新启动(飞行)控制器。向开发团队报告错误 |
无效的 FENCE_ALT_MAX 值 |
FENCE_ALT_MAX 必须为正值 |
|
无效的 FENCE_ALT_MIN 值 |
FENCE_ALT_MIN 必须大于 -100 |
|
无效的 FENCE_MARGIN 值 |
FENCE_MARGIN 必须为正数 |
增加 栅栏 |
无效的 FENCE_RADIUS 值 |
FENCE_RADIUS 必须为正数 |
增加 栅栏_RADIUS |
记录失败 |
无法写入日志。可能是硬件故障 |
重新启动(飞行)控制器。更换(飞行)控制器 |
日志记录未启动 |
无法写入日志。可能是硬件故障 |
重新启动(飞行)控制器。更换(飞行)控制器 |
慢速主回路(xHz < 400Hz) |
(飞行)控制器 CPU 负载过重 |
查看错误是否是暂时的。禁用功能或更换动力更强的(飞行)控制器。减少 调度循环速率 |
边距小于包容圆半径 |
圆形围栏的半径低于 FENCE_MARGIN |
增大或缩小所涉及的圆形围栏的尺寸 栅栏 |
辅助授权内存不足 |
(飞行)控制器内存不足 |
禁用功能或更换为动力更强的(飞行)控制器 |
缺少任务项目:启动陆地 |
自动飞行任务需要 DO_LAND_START 命令 |
在任务中添加 DO_LAND_START 命令或调整 上膛多个项目 规范 |
缺少的任务项目:土地 |
自动任务需要 LAND 命令 |
在任务中添加 "土地 "命令或调整 上膛多个项目 规范 |
缺少任务项目:RTL |
自动任务需要 RTL 命令 |
在任务中添加 RTL 命令或调整 上膛多个项目 规范 |
缺少任务项目:起飞 |
自动任务需要 TAKEOFF 命令 |
在任务中添加 "起飞 "命令或调整 上膛多个项目 规范 |
缺少任务物品:Vtol 土地 |
自动任务需要 VTOL_LAND 命令 |
在任务中添加 VTOL_LAND 命令或调整 上膛多个项目 规范 |
缺少任务项目:VTOL 起飞 |
自动任务需要 VTOL_TAKEOFF 命令 |
在任务中添加 VTOL_TAKEOFF 命令或调整 上膛多个项目 规范 |
模式通道和 RCx_OPTION 冲突 |
遥控飞行模式开关也用于辅助功能 |
更改 FLTMODE_CH(或 Rover 的 MODE_CH)或 RCx_OPTION,以消除冲突 |
模式要求任务 |
尝试在自动模式下上膛,但没有任务 |
以其他模式上膛或创建并上传自动任务 |
电机紧急停止 |
电机紧急停止 |
释放紧急停止装置。参见 辅助功能 |
安装:检查类型 |
支架(又称摄像机云台)配置错误 |
|
坐骑:不健康 |
支架无法与(飞行)控制器通信 |
检查(飞行)控制器与万向节之间的物理连接,并检查 云台配置 |
为 RC 输入配置的多个串行端口 |
遥控配置错误 |
看看 多个无线电遥控接收器 |
没有任务图书馆 |
自动任务功能已禁用 |
定制服务器 可能是用来生成不带自动任务的固件。启用自动任务后重建 |
没有集会图书馆 |
已禁用集结点功能 |
定制服务器 可能是用来生产不带拉力点的固件。包含反弹点的重建 |
无 SD 卡 |
SD 卡损坏或丢失 |
格式化或更换 SD 卡 |
没有足够近的集结点 |
集结点的距离超过 RALLY_LIMIT_KM |
移动 拉力点 更接近载具当前位置或增加 RALLY_LIMIT_KM |
OA 需要重新启动 |
更改对象回避配置需要重启 |
重启(飞行)控制器。查看 物体避让配置 |
OpenDroneID:ARM_STATUS 不可用 |
OpenDroneID 配置错误 |
看看 远程 ID 配置 |
OpenDroneID:必须设置操作员位置 |
操作员位置不详 |
看看 远程 ID 配置 |
OpenDroneID:系统不可用 |
OpenDroneID 配置错误 |
看看 远程 ID 配置 |
OpenDroneID:BasicID 中需要 UA_TYPE |
OpenDroneID 配置错误 |
看看 远程 ID 配置 |
OSD_TYPE2 与第一个 OSD 不兼容 |
OSD1 和 OSD2 配置不兼容 |
|
参数存储失败 |
Eeprom 硬件故障 |
检查电源或更换(飞行)控制器 |
PiccoloCAN:未检测到伺服器 x |
PiccoloCAN 配置错误或伺服器问题 |
|
引脚 x 禁用(ISR 洪水) |
连接到 GPIO 引脚的传感器正在快速变化 |
检查指定针脚上的传感器 |
螺距 (RCx) 不中立 |
遥控发射机的俯仰杆不居中 |
将 RC 调距杆移至中心位置或重复 无线电校准 |
无线电最大音调过低 |
RC 螺距通道最大值低于 1700 |
|
无线电分贝过高 |
RC 螺距通道最小值高于 1300 |
|
PRXx:无数据 |
接近传感器未提供数据 |
检查接近传感器的物理连接和 配置 |
PRXx:未连接 |
接近传感器未提供数据 |
检查接近传感器的物理连接和 配置 |
无线电故障保护开启 |
遥控故障保护装置已触发 |
打开遥控发射机或检查遥控故障安全配置 |
测距仪 x:未连接 |
测距仪未提供数据 |
检查测距仪与(飞行)控制器的物理连接和 配置 |
测距仪 x:未检测到 |
测距仪未提供数据 |
检查测距仪与(飞行)控制器的物理连接和 配置 |
RC 校准 |
正在进行遥控校准 |
完成 无线电校准 程序 |
RC 未校准 |
尚未进行遥控校准 |
完成 无线电校准. RC3_MIN 和 RC3_MAX 必须更改默认值(1100 和 1900),通道 1 至 4 的 MIN 值必须小于或等于 1300,MAX 值必须大于或等于 1700。 |
未找到 RC |
启用 RC 故障安全,但无 RC 信号 |
打开遥控发射机或检查遥控发射机与(飞行)控制器的连接。如果仅使用 GCS 操作,请参阅 仅使用地面控制站进行操作 |
RCx_MAX 小于 RCx_TRIM |
遥控配置错误 |
调整 RCx_TRIM,使其低于 RCx_MAX,或重复此操作 无线电校准 |
RCx_MIN 大于 RCx_TRIM |
遥控配置错误 |
调整 RCx_TRIM,使其高于 RCx_MIN,或重复此操作。 无线电校准 |
RELAYx_PIN=y 无效 |
中继器配置错误 |
RELAYx_PIN 设置为无效值。检查 继电器设置说明 |
RELAYx_PIN=y, 设置 SERVx_FUNCTION=-1 |
中继器配置错误 |
将 SERVOx_FUNCTION 设置为 -1 |
未设置 RNGFNDx_PIN |
测距仪配置错误 |
将 RNGFNDx_PIN 设置为非零值。参见 测距仪配置 |
RNGFNDx_PIN=y 无效 |
测距仪配置错误 |
RNGFNDx_PIN 设置为无效值。检查 测距仪配置 |
RNGFNDx_PIN=y, 设置 SERVOx_FUNCTION=-1 |
测距仪配置错误 |
将 SERVOx_FUNCTION 设置为 -1 |
滚动 (RCx) 不中立 |
遥控发射机的滚动杆不居中 |
将遥控摇杆移至中心位置或重复 无线电校准 |
滚动无线电最大值过低 |
RC 辊道最大值低于 1700 |
|
滚动无线电分钟数过高 |
最小 RC 辊道高于 1300 |
|
未设置 RPMx_PIN |
转速传感器配置错误 |
检查 RPMx_PIN 值。检查 转速设置说明 |
RPMx_PIN=y 无效 |
转速传感器配置错误 |
RPMx_PIN 设置为无效值。检查 转速设置说明 |
RPMx_PIN=y, 设置 SERVOx_FUNCTION=-1 |
转速传感器配置错误 |
将 SERVOz_FUNCTION 设置为 -1 |
为多个 GPS 设置相同的节点 ID x |
DroneCan GPS 配置错误 |
检查 gps1_can_nodeid 和 gps2_can_nodeid 是不同的。将其中一个设置为零并重新启动(飞行)控制器 |
不同 CAN 端口上的相同 rfnd |
两个测距仪出现在不同的 CAN 端口上 |
查看 USD1、TOFSensP、NanoRadar 或 Benewake 设置说明 |
脚本:加载的 CRC 不正确 想要: x |
脚本的 CRC 不正确 |
用预期版本替换 Lua 脚本 |
脚本: 运行 CRC 不正确的愿望: x |
脚本的 CRC 不正确 |
用预期版本替换 Lua 脚本 |
脚本:XXX 启动失败 |
一个 Lua 脚本启动失败 |
(飞行)控制器内存不足或 Lua 脚本配置错误。请参见 Lua 脚本 |
脚本:XXX 内存不足 |
Lua 脚本内存不足 |
增加 SCR_HEAP_SIZE 或支票 Lua 脚本配置 |
伺服电压过低 (Xv < 4.3v) |
伺服轨电压低于 4.3V |
检查后伺服导轨的电源 |
禁用通道上的 SERVOx_FUNCTION=y |
PWM 输出配置错误 |
为已禁用的伺服输出设置 SERVOx_FUNCTION。参见 BLHeli 设置 |
SERVOx_MAX 小于 SERVOx_TRIM |
PWM 输出配置错误 |
设置 SERVOx_TRIM 小于 SERVOx_MAX |
SERVOx_MIN 大于 SERVOx_TRIM |
PWM 输出配置错误 |
将 SERVOx_TRIM 设置为高于 SERVOx_MIN |
温度校准运行 |
温度校准正在运行 |
等到 温度校准 完成或重启(飞行)控制器 |
地形残缺 |
自动任务使用地形,但禁用了地形 |
启用地形数据库(设置 TERRAIN_ENABLE = 1)或删除使用地形高度的自动任务项目。对于旋翼飞行器,也要检查 RTL_ALT_TYPE。 |
地形超出记忆 |
(飞行)控制器内存不足 |
禁用功能或更换为动力更强的(飞行)控制器 |
节流阀/电门 (RCx) 不中立 |
遥控发射机的油门杆过高 |
降低油门杆或重复 无线电校准 |
无线电节气门最大值过低 |
遥控节流通道最大值低于 1700 |
|
无线电节气门最小值过高 |
遥控节流通道最小值高于 1300 |
|
辅助授权人过多 |
超过 3 个外部系统控制上膛 |
检查外部授权系统 |
围栏外载具 |
载具在围栏外 |
在围栏内移动载具 |
VisOdom: 不健康 |
目视测量传感器未提供数据 |
检查视觉里程计的物理连接和 配置 |
VisOdom: 内存不足 |
(飞行)控制器内存不足 |
禁用功能或更换为动力更强的(飞行)控制器 |
VTOL 前进节流阀不为零 |
遥控发射机的 VTOL Fwd 节流阀杆偏高 |
降低 VTOL Fwd 节流杆或重复操作 无线电校准 |
等待地形数据 |
等待 GCS 提供所需的地形数据 |
等待或移动到 GPS 接收更好的位置 |
偏航/航向 (RCx) 不中立 |
遥控发射机的偏航杆不居中 |
将遥控偏航杆移至中心位置,或重复此操作 无线电校准 |
偏航无线电最大值过低 |
RC 偏航通道最大值低于 1700 |
|
偏航无线电最小值过高 |
RC 偏航通道最小值高于 1300 |
留言 |
原因 |
解决方案 |
|---|---|---|
检测到 ADSB 威胁 |
ADSB 故障保护。附近有人驾驶的载具 |
参见 ADSB 配置 |
AHRS 不健康 |
AHRS/EKF 尚未准备就绪 |
等待。重启(飞行)控制器FS_LONG_TIMEOUT < FS_SHORT_TIMEOUT |
AIRSPEED_MIN 太低 x<5 m/s |
参数设置过低,低于 5m/s |
升至高于失速速度至少 20% 的高度 |
错误参数:ATC_ANG_PIT_P 必须为 > 0 |
姿态控制仪配置错误 |
将指定参数值增至零以上。参见 飞行稳定调整过程说明 |
错误参数:PSC_POSXY_P 必须为 > 0 |
位置控制器配置错误 |
将指定参数值增至零以上。参见 飞行稳定调整过程说明 |
检查 Q_ANGLE_MAX |
设置在 80 度以上 |
减少 Q_ANGLE_MAX 低于 80 度;一般为 30 度 |
在着陆顺序中 |
仍在着陆序列中时尝试上膛 |
重置任务;改为不在着陆序列中的任务项目 |
反向节流阀输入的 THR_FS_VALUE 无效 |
THR_FS_VALUE pwm 未超出最大节流阀 |
设置 THR_FS_VALUE 高于节流阀最大 pwm |
ROLL_LIMIT_DEG 太小 x |
参数设置低于 3 度 |
增加,建议至少增加 45 度以实现充分控制 |
PTCH_LIM_MAX_DEG 太小 x |
参数设置低于 3 度 |
增加,建议至少增加 45 度以实现充分控制 |
PTCH_LIM_MIN_DEG 过大 x |
参数设置超过 3 度 |
增加,建议至少增加 45 度以实现充分控制 |
模式不可上膛 |
无法从该模式启动 |
更改模式 |
模式不是 QMODE |
设置 Q_OPTION 以防止上膛,QMODE/AUTO 除外 |
更改模式或重置 Q_OPTIONS 位 18 |
电机:检查机架等级和类型 |
未知或配置错误的帧类或类型 |
输入有效的框架级别和/或类型 |
电机:检查 MOT_PWM_MIN 和 MOT_PWM_MAX |
MOT_PWM_MIN 或 MOT_PWM_MAX 配置错误 |
设置 MOT_PWM_MIN = 1000 和 MOT_PWM_MAX = 2000,然后重复 电调校准 |
电机:MOT_SPIN_ARM > MOT_SPIN_MIN |
MOT_SPIN_ARM 过高或 MOT_SPIN_MIN 过低 |
减少 MOT_SPIN_ARM 至以下 MOT_SPIN_MIN.湖泊 设置电机范围 |
电机:MOT_SPIN_MIN 过高 x > 0.3 |
MOT_SPIN_MIN 参数值过高 |
减少 MOT_SPIN_MIN 到 0.3 以下。参见 设置电机范围 |
电机:未将 SERVOx_FUNCTION 设置为 MotorX |
至少有一个电机输出未配置 |
检查 "电机 1"、"电机 2 "等的 SERVOx_FUNCTION 值。检查 电调和电机配置 |
未设置 Q_ASSIST_SPEED |
未设置 Q_ASSIST_SPEED |
|
垂直起降已启用但未运行 |
已设置 Q_ENABLE,但 QuadPlane 代码尚未启动 |
重新启动 |
垂直起降需要 SCHED_LOOP_RATE >= 100 |
垂直起降需要更快的循环时间来提高性能 |
增加 调度循环速率典型值为 300 |
将 Q_FWD_THR_USE 设置为 0 |
尝试在尾随者上使用全轮驱动节气门 |
设置 Q_FWD_THR_USE = 0 |
设置 TAILSIT_ENABLE 0 或 TILT_ENABLE 0 |
不能同时拥有倾转旋翼机和尾翼 |
选择与您的载具配置相匹配的配置并重新启动 |
tailsitter 设置未完成,重启 |
倾斜飞行器已启用,但尚未重启 |
重新启动 |
倾斜仪设置未完成,重启 |
启用了跟踪器,但尚未重启 |
重新启动 |
油门微调未靠近中心杆 %x |
遥控调节油门杆居中使用不正确 |
将节流通道 RC 调节器设置到中心位置(怠速),如果 飞行选项 第 10 位被设置。 |
等待 RC |
启用 RC 故障安全,但无 RC 信号 |
打开遥控发射机或检查遥控发射机与(飞行)控制器的连接。如果仅使用 GCS 操作,请参阅 仅使用地面控制站进行操作 |
其他故障信息¶
故障触发保护机制¶
任何故障保护(遥控、电池、GCS 等)都会显示信息并阻止上膛。
气压计故障:¶
巴罗不健康 气压传感器报告不健康,这通常是硬件故障的迹象。
悬殊 气压计高度:气压计高度与惯性导航(即气压计+加速度计)高度估计值相差 1 米以上。该信息通常持续时间较短,可能在(飞行)控制器刚插上电源或受到剧烈震动(如突然掉落)时出现。如果没有清除 加速度计可能需要校准 或者可能是气压计硬件问题。
指南针故障:¶
指南针不健康 说明:罗盘传感器报告不健康,这是硬件故障的迹象。
罗盘未校准 :"...... 罗盘未校准......。
COMPASS_OFS_X、 _Y, _Z 参数为零,或者自上次进行罗盘校准以来,连接的罗盘数量或类型已发生变化。
罗盘偏置过高 :主罗盘的偏移长度(即 sqrt(x^2+y^2+z^2))大于 500。这可能是由于金属物体离指南针太近造成的。如果只使用内部罗盘(不建议使用),则可能只是电路板中的金属导致偏移过大,这实际上可能不是问题,在这种情况下,您可以禁用罗盘检查。
检查磁场 :这可能是两种不同的检查失败造成的。首先,该区域的感应磁场比预期值高或低 35%。预期长度为 530,因此是 874 或 185。此外,除了这种粗略的检查外,在获得载具位置(GPS 锁定)后,还会根据使用内部世界磁场数据库预测的磁场强度进行另一次检查,其限制要严格得多。如果没有通过,则 罗盘校准 没有计算出良好的偏移量,需要重新校准,或者您的载具靠近大的金属或磁场干扰,需要重新定位。
指南针不一致 内部指南针和外部指南针指向不同的方向(偏离 45 度)。这通常是由于外部罗盘的方向(即 欧里亚特 参数)设置不正确。
与 GPS 有关的故障:¶
GPS 故障 :"...... GPS 出现故障 且飞行器处于需要 GPS 的飞行模式(如 Loiter、PosHold 等)和/或 外圆栅栏 已启用。
需要 3D 修复 如果全球定位系统没有 3D 定位,而飞行器处于需要全球定位系统和/或 外圆栅栏 已启用。
糟糕的速度 速度:载具的速度(根据惯性导航系统)超过 50 厘米/秒。可能导致这种情况的问题包括载具实际移动或掉落、加速度计校准不良、GPS 更新频率低于预期的 5 赫兹。
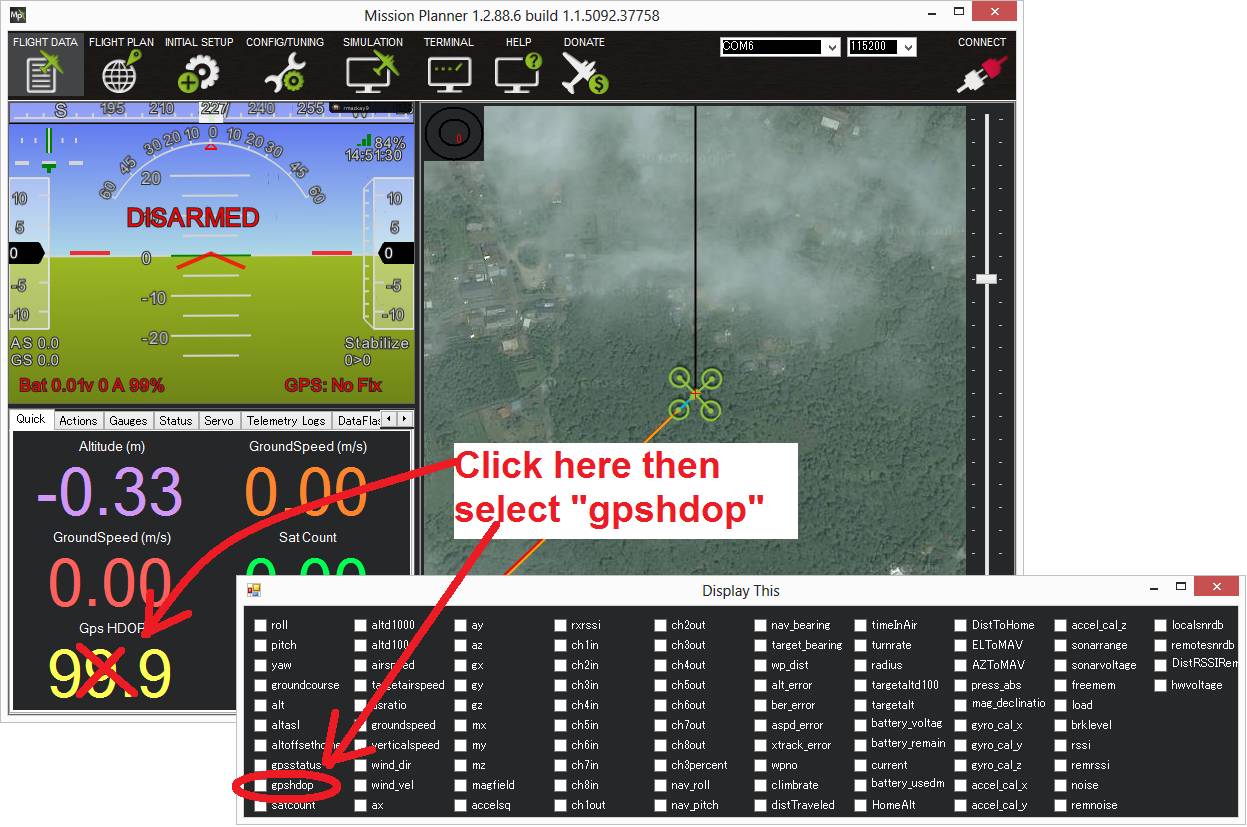
高 GPS HDOP :GPS 的 HDOP 值(衡量定位精度的指标)高于 2.0,且飞行器处于需要 GPS 和/或 GPS 的飞行模式。 外圆栅栏 启用。要解决这个问题,只需等待几分钟、换一个天空视野更好的地方或检查 GPS 干扰源(如 FPV 设备)是否离 GPS 更远。或者也可以通过增加 GPS_HDOP_GOOD 参数设置为 2.2 或 2.5。在最坏的情况下,飞行员可以禁用栅栏,在不需要 GPS 的模式下起飞(如稳定、AltHold),并在上膛后切换到 Loiter 模式,但不建议这样做。
注: GPS HDOP 可通过Mission Planner地面站的 "快速 "选项卡随时查看,如下图所示。
INS 检查(即加速计和陀螺仪检查):¶
INS 未校准:加速度计的部分或全部偏移为零。加速度计 加速度计需要校准.
Accels 不健康说明:其中一个加速度计报告不健康,这可能是硬件问题。这种情况也可能在固件更新后,电路板重启前立即出现。
Accels 不一致说明:加速度计报告的加速度至少相差 1 米/秒。加速度 加速度计需要重新校准 或者是硬件问题。
烤肉不健康陀螺仪:其中一个陀螺仪报告不健康,这可能是硬件问题。在重新启动电路板之前,固件更新后也可能立即出现这种情况。
陀螺仪校准失败陀螺仪校准无法捕捉偏移。最常见的原因是在陀螺仪校准过程中(红灯和蓝灯闪烁时)载具被移动,在这种情况下,拔下电池重新插上,同时注意不要颠簸载具,就可能解决问题。传感器硬件故障(如尖峰)也会导致此故障。
前后不一致的陀螺问题:两个陀螺仪报告的载具旋转率相差超过 20deg/sec。这可能是硬件故障或陀螺仪校准不良造成的。
检查电路板电压:¶
检查电路板电压说明:电路板内部电压低于 4.3 伏或高于 5.8 伏。
如果通过 USB 电缆供电(即在工作台上时),这可能是由于台式电脑无法为(飞行)控制器提供足够的电流 - 尝试更换 USB 电缆。
如果使用电池供电,则问题严重,飞行前应仔细检查供电系统(如电源模块、电池等)。
参数检查:¶
Ch7&Ch8 选项不能相同: 辅助功能开关 设置为相同的选项,这是不允许的,因为这可能导致混淆。
检查 FS_THR_VALUE:"...... 无线电故障安全 Pwm 值 设置过于接近节流通道(即 ch3)的最小值。
检查 ANGLE_MAX:"...... 最大角度 控制载具最大倾斜角的参数被设置为低于 10 度(即 1000)或高于 80 度(即 8000)。
acro_bal_roll/pitch:"...... ACRO_BAL_ROLL 参数高于稳定辊 P 和/或 ACRO_BAL_PITCH 参数高于稳定螺距 P 值。这可能导致飞行员在 ACRO 模式下无法控制倾角,因为 Acro Trainer 稳定器 会压倒飞行员的输入。
电池/电源监控器:¶
如果电源监控器电压低于其失效保护低电压或临界电压,或失效保护剩余容量低电压或临界设定点,则该检查将失败,并显示低于哪个设定点。如果这些设定点倒置,即临界点高于低点,则检查也将失败。参见 电池故障安全 代表 Copter、 平面故障保护功能 表示平面,或 故障触发保护机制 更多信息,请访问 Rover 网站。
此外,还可为每个电池/电源监控器设置最低上膛电压和剩余容量参数,例如 BATT_ARM_VOLT 和 BATT_ARM_MAH 对第一块电池进行检查,以确保电池不仅高于故障安全水平,而且有足够的容量进行操作。
空速¶
如果已配置空速传感器,但其未提供读数或校准失败,则此检查将失败。
空速不健康
记录:¶
记录失败:日志预置已启用,但未能写入日志。
无 SD 卡:记录已启用,但未检测到 SD 卡。
安全开关:¶
硬件安全开关:硬件安全开关未按下。
系统:¶
参数存储失败:读取参数存储区的检查失败。
内部错误 (0xx):发生内部错误。向 ArduPilot 开发团队报告 这里
KDECAN 失败:KDECAN 系统故障。
DroneCAN 失败:DroneCAN 系统故障。
任务:¶
参见 上膛多个项目
没有任务图书馆:任务检查已启用,但未加载任务。
没有集会图书馆:已启用集结点检查,但未加载集结点。
缺少任务物品:XXXX:缺少任务所需物品。
测距仪:¶
如果已配置测距仪,则出现报告错误。
禁用臂前安全检查¶
警告
不建议禁用预臂安全检查。如果可能的话,应在载具运行前纠正导致臂前部故障的原因。如果您确信臂前检查故障不是真正的问题,可以禁用故障检查。
可以通过设置 上膛检查 参数设置为 0 则完全取消所有预启动检查。例如,设置为 4 只检查 GPS 是否锁定。
这也可以通过Mission Planner地面站进行配置:
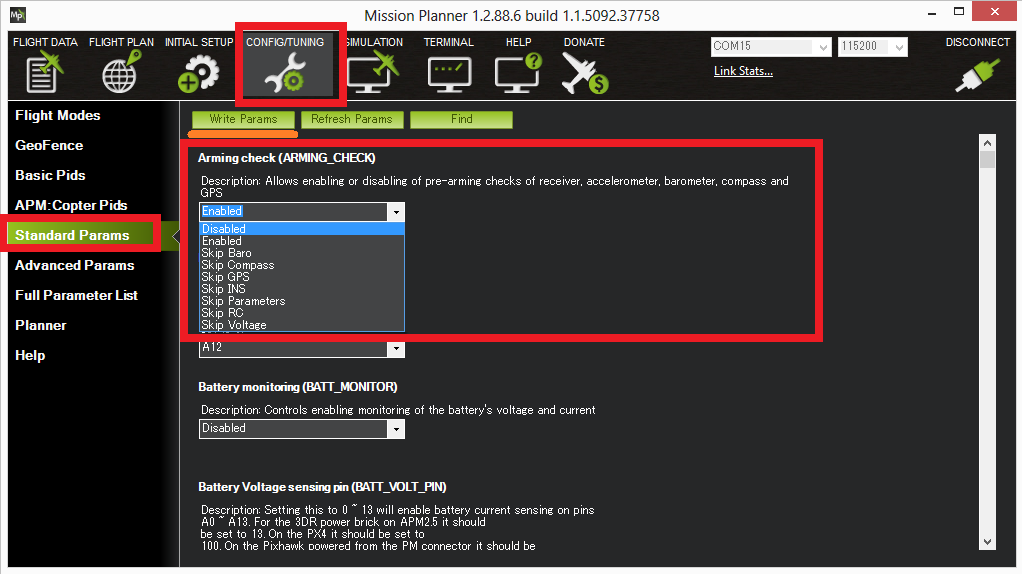
将(飞行)控制器连接到Mission Planner地面站
转到Mission Planner地面站的 "配置/调整>>标准参数 "屏幕
将上膛检查下拉菜单设置为 "禁用 "或 "跳过 "选项之一,这样可以更有效地跳过导致故障的项目。
按下 "写参数 "按钮