启动和校准平面¶
本文介绍了在启动 Plane 之前应进行的基本设置和校准。
地面校准¶
将发射机模式开关设置为 手册.这是启动系统的安全模式。
在机场接通滑板电源时,应让飞机在地面上保持不动,直到 发光二极管 停止闪烁蓝光和红光(约 30 秒)。这意味着陀螺仪已经校准。
解除安全开关(如有)¶
如果(飞行)控制器有 安全开关 连接后,必须先将其脱开,然后才能将载具 上膛.
安全开关 LED 指示灯:
快速闪烁表示:错误状态,安全系统无法解除。可能未校准或传感器出错。
缓慢闪烁表示:安全状态。按下安全按钮 5 秒钟,即可解除安全状态。
LED 持续亮起表示:安全系统已解除。(飞行)控制器可在油门向下和向右的情况下启动。
当 LED 持续亮起表示安全解除时,可通过按下安全按钮 5 秒钟将其切换回安全启动状态。
备注
在 "安全启动 "和 "安全解除 "状态下,都需要按住按钮 5 秒钟才能切换。这是一种安全机制,可防止在飞行过程中意外解除和在运输过程中意外启动。
校准并检查空速传感器(如有)¶
如果载具有 空速传感器 则 此处所述的飞行前检查 每次飞行前都应执行。
警告
确保在开机和/或飞行前强制校准时轻轻盖住气孔,以防止风导致校准错误。并确保在飞行前取下盖子!
等待 GPS 锁定¶
飞行前应等待 GPS 锁定。 发光二极管 变为绿色。如果不等待 GPS 锁定,气压高度计的校准将是不正确的。 RTL, 位置悬停, 载具 以及任何其他依赖 GPS 的模式都将无法正常工作。
对于飞机而言,原点位置最初是在飞机获得 GPS 锁定时确定的。然后,只要(飞行)控制器处于解除状态,该位置就会持续更新。
这意味着如果您执行 RTL,飞机将返回到上膛时的位置。如果您上膛的位置不是一个很好的返回点,那么请设置一个 号召力 相反。对于 RTL,将优先使用集结点,而不是家庭所在地。
检查伺服运动¶
每次飞行前:起飞前,将飞机握在手中并切换到 FBWA 模式,然后俯仰飞机,确认控制面是否以正确的方式移动,使飞机恢复水平飞行。(副翼和升降舵会移动;方向舵仅在飞行中与副翼协调转动,因此在地面上不会有太大移动)。这将确保您没有意外颠倒通道。
每次飞行前都应该这样做,就像用遥控发射机移动控制面一样,以确保没有任何反转。 做不到这一点是导致崩溃的首要原因。
备注
作为一项安全措施,只有在手动模式、稳定模式或自动模式下的自动起飞模式下,您的油门才会在地面上启动。在任何其他自动模式下,只有当您在空中运动时才会启动油门。
首次飞行¶
强烈建议您切换到 "稳定 "或 "线控飞行 "模式,并观察控制面的行为。当您俯仰或滚动飞机时,它们应该会移动,使飞机恢复水平。如果还不稳定,您可以按照以下说明调整增益 这里.
如果您还没有调整过 PID 增益,那么您可以考虑在以下情况下进行第一次起飞 自动飞行稳定调整 模式。这将在起飞后立即启动调试程序。
第二次飞行¶
第二次飞行时,在Mission Planner地面站的 "飞行任务 "中将第三模式(遥控模式开关的第 3 位)更改为 RTL。 模式设置页面.
进入空中后,将载具切换到 RTL 模式。这将测试导航。飞行器应返回上膛时的位置(或最近的集结点),并以固定高度运行(可使用 Mission Planner地面站).
如果飞行器不能干脆利落地返回并在头顶上划出近乎完美的圆圈,则需要针对特定机身对(飞行)控制器进行调整。这通常可以通过调整滚动参数来实现,具体方法如下 这里.
检查完毕后,您就可以编程航点任务,并在自动模式下进行测试。
水平调节¶
在 FBWA 中以所需的巡航节流阀设置飞行后,您可能会发现飞机在发射杆居中的情况下无法保持水平姿态。如果出现这种情况,请执行以下操作:
1) 在地面为(飞行)控制器供电并连接至Mission Planner地面站后,在发射机上选择 FBWA,选择 FLIGHT DATA 调整窗口并绘制 nav_roll 和 nav_pitch 数据。在发射杆居中的情况下,这两个数据都应为零,如截图所示。如果不是,您需要重复遥控校准或调整发射机微调并重复 FBWA 飞行测试。
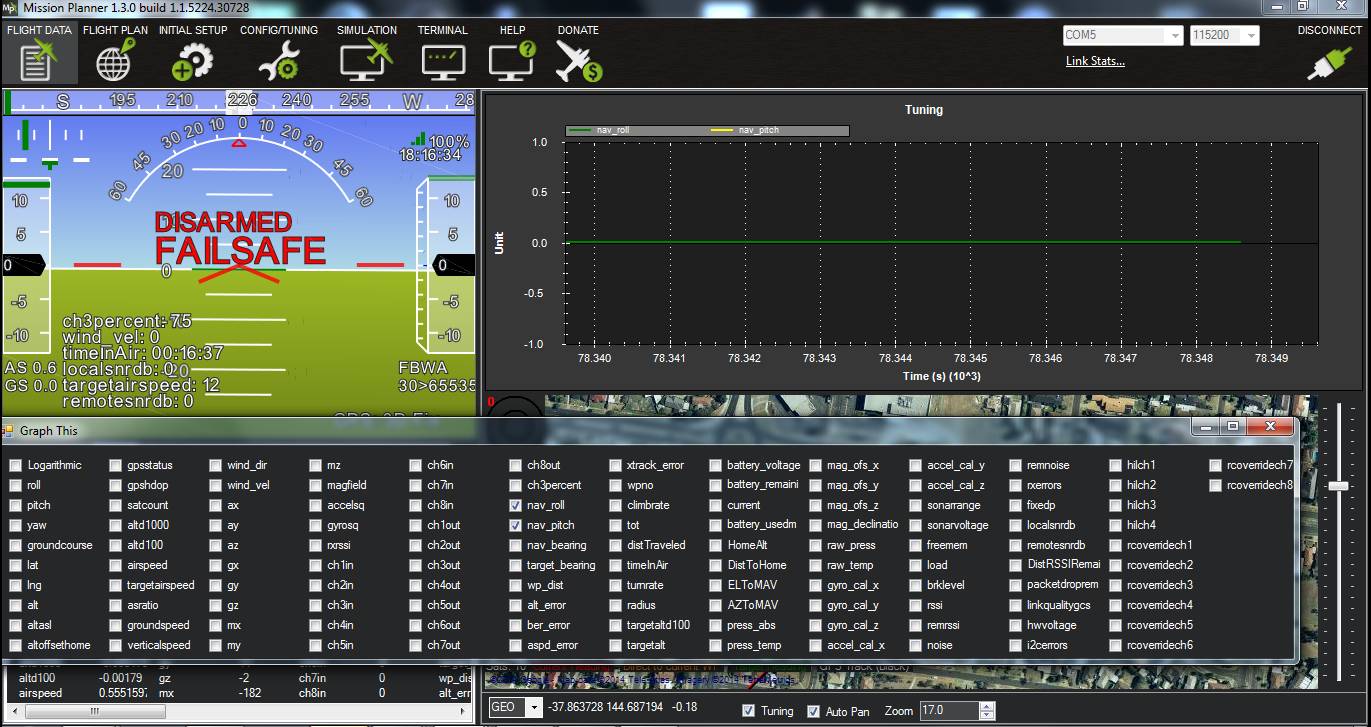
如果它们为零,则需要调整水平微调,以调整自动驾驶板与飞机在直线和水平飞行时的姿态之间的角度差,如下所述。
对于滚转误差(即摇杆中立时航向不断变化),请使用Mission Planner地面站中的 "LEVEL "加速度计校准按钮,使用水平仪将机翼调平,并将机头至机尾的机身线也调平。除非飞机发生翘曲,否则这将确保机翼在飞行中保持水平。如果飞机在摇杆中立的情况下仍在航向旋转,那么您还需要在飞行中修整方向舵(如有配备)。
如果飞机在所需的巡航节流阀位置(即速度)上通常无法在 FBWA 中保持高度,那么您可以使用 PTCH_TRIM_DEG 参数。大多数飞机要求该参数为正几度,以便在 FBWA 中获得最佳巡航修整效果。该参数的单位是厘度,因此其值为 3 度。