辅助功能¶
该功能适用于 4.0 及更高版本的固件。在 4.0 之前的 Copter 版本中,类似功能是通过 CHx_OPT 参数实现的。参见 辅助功能开关(3.6 及更早版本) page.
本页介绍如何设置附加功能,这些功能可通过发射机的辅助功能开关或外部功能开关调用。 按钮.
配置使用哪个发射机通道¶
任何遥控输入通道都可以分配任何辅助功能。但是,遥控通道不得用于任何其他功能,如飞行模式选择或飞行控制。默认情况下,通道 1-4 用于飞行控制(即滚转、前平移/俯仰、油门和偏航)。飞机和UGV无人车的默认飞行模式通道为 8,旋翼飞行器为 5。
分配功能¶
RCx_OPTION 参数可控制这些功能。例如 RC7_OPTION 每个 RC 通道都有自己的 RCx_OPTION 参数,可在完整参数列表中访问。
支持的功能¶
RCx_OPTION 值 |
功能描述 |
旋翼飞行器 |
固定翼飞行器 |
无人车UGV |
0 |
什么也不做(默认) |
X |
X |
X |
2 |
翻转 |
X |
||
3 |
简单模式(旋翼飞行器) |
X |
||
4 |
RTL 模式 |
X |
X |
X |
5 |
保存微调量 |
X |
X |
|
7 |
保存航点 |
X |
X |
|
9 |
相机触发器 |
X |
X |
X |
10 |
测距仪 |
X |
||
11 |
围栏 |
X |
X |
X |
12 |
重置上膛偏航 |
|||
13 |
超级模式 |
X |
||
14 |
水上芭蕾教练 |
X |
||
15 |
喷雾器 |
X |
||
16 |
自动模式 |
X |
X |
X |
17 |
自动飞行稳定调整模式 |
X |
||
18 |
土地模式 |
X |
||
19 |
机械爪/机械手臂 |
X |
X |
X |
21 |
启用降落伞 |
X |
||
22 |
降落伞释放 |
X |
X |
|
23 |
降落伞 3 位置开关 |
X |
||
24 |
重置自动任务启动 |
X |
X |
X |
25 |
姿态控制装置 FF |
X |
||
26 |
姿态控制仪 AccLim |
X |
||
27 |
伸缩式安装 |
X |
||
28 |
继电器 1 开/关 |
X |
X |
X |
29 |
起落架 |
X |
X |
|
30 |
丢失载具的声音 |
X |
X |
X |
31 |
电机紧急停止 |
X |
X |
X |
32 |
电机联锁 |
X |
||
33 |
制动器 |
X |
||
34 |
继电器 2 开/关 |
X |
X |
X |
35 |
继电器 3 开/关 |
X |
X |
X |
36 |
继电器 4 开/关 |
X |
X |
X |
37 |
投掷模式 |
X |
||
38 |
ADSB 启用 |
X |
||
39 |
精密装载机 |
X |
||
40 |
物体回避 |
X |
X |
|
41 |
上膛撤膛(4.1 及以前版本) |
X |
X |
X |
42 |
SMARTRTL 模式 |
X |
X |
|
43 |
反向飞行 |
X |
X |
|
44 |
启用卷扬机 |
X |
||
45 |
卷扬机控制 |
X |
||
46 |
启用 RC 超控 |
X |
X |
X |
47 |
自定义函数的 Rsvd |
X |
||
48 |
自定义函数的 Rsvd |
X |
||
49 |
自定义函数的 Rsvd |
X |
||
50 |
了解巡航 |
X |
||
51 |
手动模式 |
X |
X |
|
52 |
ACRO 模式 |
X |
X |
|
53 |
转向模式 |
X |
||
54 |
保持模式 |
X |
||
55 |
引导模式 |
X |
X |
X |
56 |
LOITER 模式 |
X |
X |
|
57 |
跟踪模式 |
X |
X |
|
58 |
清除航点 |
X |
X |
X |
59 |
简单模式(UGV无人车) |
X |
||
60 |
ZIGZAG 模式 |
X |
||
61 |
ZIGZAG 模式 - 节省航点 |
X |
||
62 |
指南针学习 |
X |
X |
X |
63 |
帆船停靠 |
X |
||
64 |
反向节流阀 |
X |
||
65 |
禁用 GPS |
X |
X |
X |
66 |
继电器 5 开/关 |
X |
X |
X |
67 |
继电器 6 开/关 |
X |
X |
X |
68 |
稳定模式 |
X |
||
69 |
POSHOLD 模式 |
X |
||
70 |
保持模式 |
X |
X |
|
71 |
流量保持模式 |
X |
||
72 |
环形模式 |
X |
X |
X |
73 |
DRIFT 模式 |
X |
||
74 |
帆船马达 3 位置旋转 |
X |
||
75 |
上/下表面跟踪 |
X |
||
76 |
待机模式 |
X |
||
77 |
起飞模式 |
X |
||
78 |
运行摄像头控制 |
X |
X |
X |
79 |
RunCam OSD 控制 |
X |
X |
X |
80 |
Viso Align |
X |
||
81 |
解除上膛 |
X |
X |
X |
82 |
Q_Assist 3Pos Sw |
X |
||
83 |
ZIGZAG 载具 |
X |
||
84 |
空气模式(非飞行模式) |
X |
X |
|
85 |
发电机/燃料电池 |
X |
X |
X |
86 |
禁用非自动地形跟踪 |
x |
||
87 |
CROW 模式开关 |
X |
||
88 |
翱翔使能 |
X |
||
89 |
Force Flare |
X |
||
90 |
EKF 位置源 |
X |
X |
X |
91 |
空速比校准 |
X |
||
92 |
FBWA 模式 |
X |
||
94 |
VTX 电源 |
X |
X |
X |
95 |
fbwa_腰带 |
X |
||
96 |
模式开关复位 |
X |
X |
X |
97 |
风向标原点偏移 |
X |
||
102 |
相机模式切换 |
X |
X |
X |
105 |
GPS 禁用偏航(仅限测试!)。 |
X |
X |
X |
106 |
禁用空速使用 |
X |
X |
X |
107 |
启用自动调整 |
X |
||
108 |
QRTL 模式 |
X |
||
112 |
SwitchExternalAHRS |
X |
X |
X |
150 |
巡航模式 |
X |
||
151 |
乌龟模式 |
X |
||
152 |
简单模式航向重置 |
X |
||
153 |
ARM/DISARM (4.2 及更高版本) |
X |
X |
X |
154 |
开启 AIRMODE 时的 ARM/DISARM(上膛/撤膛)功能 |
X |
X |
|
155 |
TRIM RC/SERVO 保存 |
X |
X |
|
156 |
Torqeedo 错误清除 |
X |
||
157 |
迫使 FBWA 长 FS 行动 |
X |
||
158 |
光流校准 |
X |
X |
|
159 |
部队飞行状态 |
X |
||
160 |
启用风向标 |
X |
||
161 |
涡轮机启动(旋翼飞行器) |
X |
||
162 |
飞行中 FFT 自动设置 |
X |
X |
|
163 |
安装锁 |
X |
X |
X |
164 |
暂停流日志记录 |
X |
X |
X |
165 |
ARM/电机紧急停止 |
X |
X |
X |
166 |
摄像机录制视频 |
X |
X |
X |
167 |
相机变焦 |
X |
X |
X |
168 |
相机手动对焦 |
X |
X |
X |
169 |
相机自动对焦 |
X |
X |
X |
170 |
QSTABILIZE 模式 |
X |
||
171 |
罗盘校准 |
X |
X |
X |
172 |
电池 MPPT 启用 |
X |
X |
X |
173 |
飞机自动放弃着陆 |
X |
||
174 |
相机图像跟踪 |
X |
X |
X |
175 |
相机镜头 |
X |
X |
X |
176 |
禁用 VTOL 前进节流阀 |
X |
用作连续 PWM 范围控制输入:
RCx_OPTION 值 |
功能描述 |
旋翼飞行器 |
固定翼飞行器 |
无人车UGV |
201 |
滚动输入 |
X |
X |
X |
202 |
PITCH 输入 |
X |
X |
X |
203 |
变速输入 |
X |
X |
X |
204 |
YAW 输入 |
X |
X |
X |
207 |
主帆 |
X |
||
208 |
襟翼控制 |
X |
||
209 |
前进节流阀 |
X |
||
210 |
空气制动器 |
X |
||
211 |
机器人行走高度 |
X |
||
212 |
安装1 卷 |
X |
X |
X |
213 |
安装1 间距 |
X |
X |
X |
214 |
偏航1 |
X |
X |
X |
215 |
安装2 卷 |
X |
X |
X |
216 |
安装2 间距 |
X |
X |
X |
217 |
偏航2 |
X |
X |
X |
300-307 |
RC 频道脚本 |
X |
X |
X |
备注
201-204 未执行,留待将来使用。
功能说明¶
备注
在以下描述中,通道的 LOW 和 HIGH 分别指 PWM 1200us 和 1800us。
模式开关¶
任何以 "模式 "结尾的功能都可以通过将遥控通道设置为高电平将载具切换到该模式。您可以有多个 "模式 "选项开关,而且一次可以有多个开关处于高电平状态。最后一个 "模式 "切换开关将决定当前的模式,以及正常模式开关的任何变化。
例如,如果 "LOITER 模式 "开关处于激活状态,然后 "AUTO 模式 "开关被切换为高电平,则模式将变为 "AUTO"。即使两个 RCx_OPTION 模式开关都处于高电平,更改正常飞行模式开关也会再次将模式更改为新的飞行模式设置。将激活的 RCx_OPTION 模式开关降回低电平将使飞行模式返回到飞行模式通道上设置的任何模式,但前提是当前模式与该开关设置的模式一致。否则不会产生任何影响。
备注
不保证旋翼飞行器和UGV无人车模式的更改。如果不满足该模式所需的条件,它们可能会被拒绝。例如,如果 GPS 锁定未激活,在 Copter 模式下更改为 LOITER 模式就会失败,而在 Plane 模式下,所需的模式将尽可能更改和运行。
备注
如果映射到三档开关上,那么超级模式功能将允许 超级 和 简单 分别使用高位和中位开关启用模式(双位开关只能启用/禁用超等模式)。 详情请见此处.
其他功能包括
选项
说明
翻转
保存微调量
保存航点
相机触发器
测距仪
围栏
水上芭蕾教练
在 ACRO 飞行模式下打开自动调平。
喷雾器
打开 农作物喷雾器 当开关被拉到高电平时
机械爪/机械手臂
启用降落伞
降落伞释放
降落伞 3Pos
任务重置
重置自动,运行命令列表中的第一个任务命令。
AttCon 反馈
AttCon 加速限制
伸缩式安装
移动 摄像机支架 回到缩回位置。
继电器 1 开/关
起落架
展开或收回 起落架
丢失载具警报器
播放 旋翼飞行器丢失警报 通过蜂鸣器
紧急停止电机
立即停止电机 (视频)
电机联锁
制动器
继电器2 开/关
继电器3 开/关
继电器4 开/关
投掷
ADSB-Avoidance
精密装载机
物体回避
上膛/撤膛(4.1 及更早版本)
选项
说明
反向飞行
启用卷扬机
卷扬机控制
启用 RC 超控
了解巡航
清除航点
清除当前加载的任务航点。
指南针学习
帆船停靠
反向节流阀
禁用 GPS
通过禁用 GPS 来模拟 GPS 故障。
继电器 5 开/关
继电器 6 开/关
帆船电机 3 位置开关
上/下表面跟踪
备用
运行摄像头控制
RunCam OSD 控制
VISO Align
将外部目视航向测量值与当前(飞行)控制器 AHRS 对齐
解除上膛
Q_Assist 3Pos SW
之字形模式自动启用
空气模式(非飞行模式)
启用或禁用 AIRMODE 功能。参见 空气模式
发电机/燃料电池
Richenpower 混合动力发电机/燃料电池的模式控制
禁用非自动地形跟踪
在 CRUISE 和 FBWB 模式下禁用地形跟踪功能
CROW 模式开关
在不同的 CROW 副翼操作模式之间进行选择
翱翔使能
启用翱翔功能运行模式
Force Flare
EKF 位置源
空速比校准
VTX 电源
fbwa_腰带
模式开关复位
强制重新读取模式开关。
风向标原点方向偏移
相机模式切换
GPS 禁用偏航
测试时禁用偏航(仅限高级用户!)。
禁用空速使用
在空中测试时,强制禁用 "空速使用"。
启用自动调整
SwitchExternalAHRS
简单模式航向重置
ARM/DISARM (4.2 及更高版本)
开启 AIRMODE 时的 ARM/DISARM(上膛/撤膛)功能
TRIM RC/SERVO 保存
Torqeedo 错误清除
清除 Torqeedo 电机控制器中的错误条件。
强制 FBWA 作为长期 FS 行动
光流校准
校准光流参数。
动力飞行
启用风向标
在垂直起降 VTOL 模式中启用或禁用风化。
涡轮机启动(旋翼飞行器)
飞行中 FFT 自动设置
安装锁
暂停流日志记录
ARM/电机紧急停止
摄像机录制视频
控制某些相机/支架的视频录制。
相机变焦
在某些相机/支架上控制相机变焦。
相机手动对焦
改变某些相机/支架的手动对焦。
相机自动对焦
控制某些相机/支架的自动对焦。
罗盘校准
电池 MPPT 启用
启用 Packet Digital MPPT 太阳能电池板功率监控器
飞机自动模式着陆终止
相机图像跟踪
激活摄像机图像跟踪(仅 ViewPro 摄像机云台支持)
相机镜头
选择活动摄像机镜头(仅 ViewPro 摄像机云台支持)
禁用 VTOL 前进节流阀
在 VTOL 模式下覆盖使用前向油门
滚动输入
滚动输入通道。(取代 RCMAP)
PITCH 输入
PITCH 输入通道。(取代 RCMAP)
变速输入
THROTTLE 输入通道。(取代 RCMAP)
YAW 输入
YAW 输入通道。(取代 RCMAP)
主帆
SERVOx_FUNCTION= 89),而不是从节气门输入通道(如果有辅助电机则有用使用该输入)。参见帆船 配置和设置 对于有关主帆设置的更多信息。襟翼
前进节流阀
空气制动器
控制部署 空气制动器
机器人行走高度
机器人行走高度的输入通道。请参见 行走机器人.
安装1 卷
1 号摄像机云台的滚动控制
安装1 间距
1 号摄像机云台的俯仰控制
偏航1
1 号摄像机云台的偏航控制
安装2 卷
第二摄像机云台的滚动控制
安装2 间距
第二摄像机云台的俯仰控制
偏航2
第二摄像机云台的偏航控制
RC 频道脚本
允许读取用于脚本输入的专用 RC 通道
检查通道范围¶
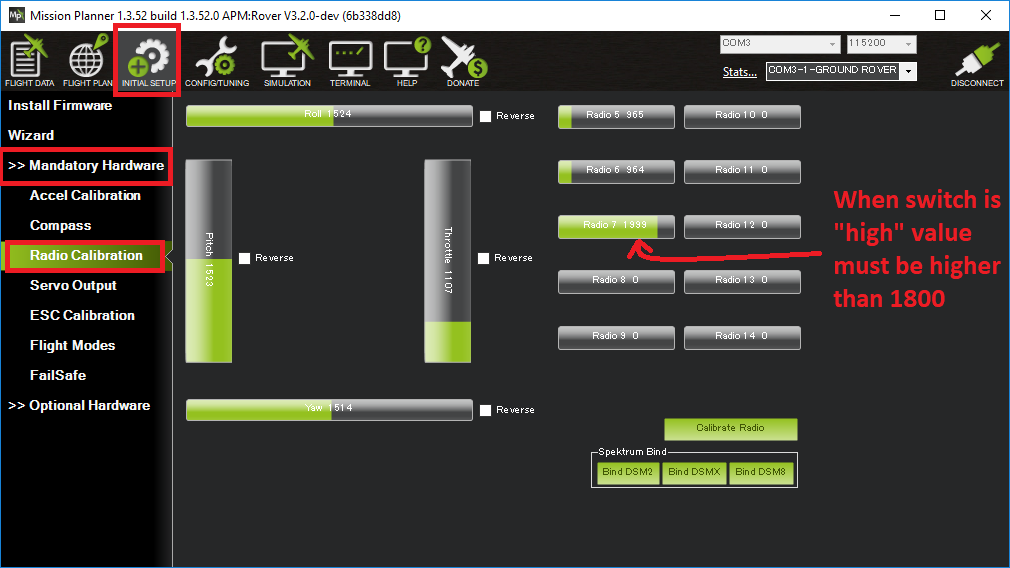
当辅助开关的 PWM 值高于 1800 时,将触发所配置的功能。当该值低于 1200 时,该功能将被停用。
您可以使用Mission Planner地面站的初始设置 >>强制硬件 >>无线电校准屏幕,检查开关处于高位和低位时发射机发送的 PWM 值。如果它没有爬升到高于 1800 或低于 1200,最好调整发射机中的伺服端点。