好盈 DroneCAN 电子调速器¶

带有 CAN 接口的 Hobbywing ESC (包括这些该功能允许(飞行)控制器通过 CAN 控制电调/电机,并检索各电机的转速、电压、电流和温度。
备注
请确保订购的是 CAN 版本的电调。如有疑问,请联系好盈。某些电调可能需要特别订购才能获得 CAN 接口。
本页面内容已通过 好盈 X6 Plus(6218-150KV CW 电机).
部分图片由 hobbywing.com 提供
连接和配置¶
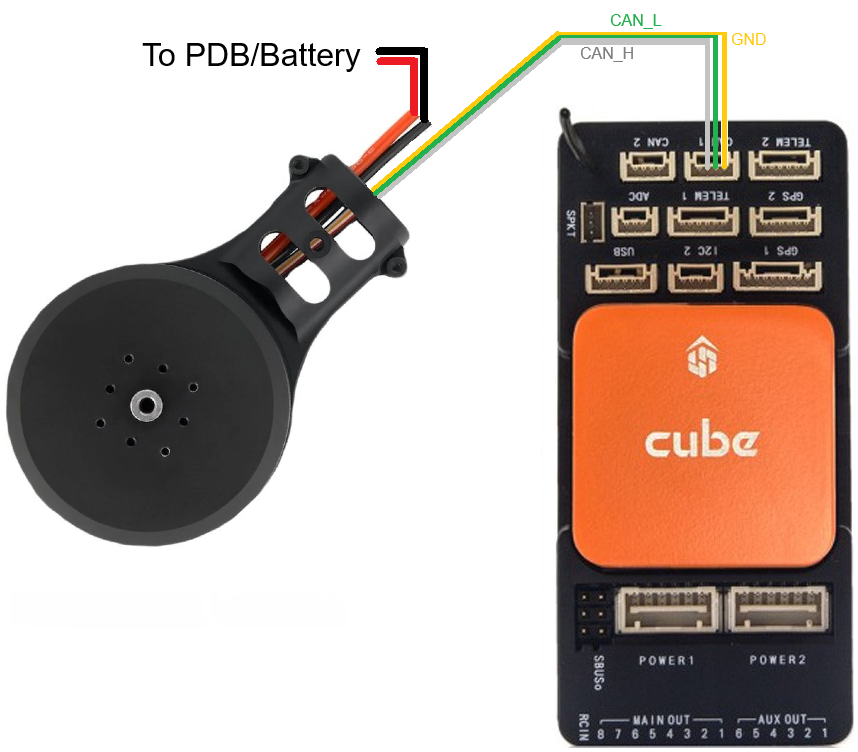
将电调(可能使用 4 针 I2C 分线器)连接到(飞行)控制器的 CAN1(或 CAN2)端口。
备注
CAN_H 接线的颜色从红色到灰色不等,视产品而定
用地面站连接(飞行)控制器,设置以下参数,然后重新启动(飞行)控制器
设置 CAN_P1_DRIVER 至 1(第一驾驶员)
设置 can_d1_protocol 至 1 (DroneCAN)
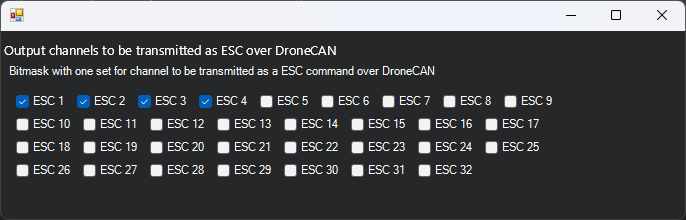
设置 can_d1_uc_esc_bm 来配置通过 CAN 传输的伺服输出。对于大多数四旋翼飞行器,应将其设置为 15,以便向 DroneCAN 发送 1-4 输出。
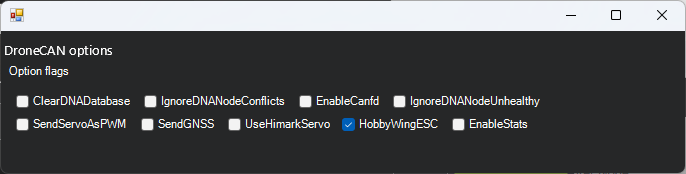
修改 can_d1_uc_option 以便选中 "Hobbywing ESC"(或直接设置为 128)
配置电子调速器¶
默认情况下,电调出厂时的波特率不正确(500,000 而不是 1,000,000),并且所有 ID 都设置为 1(第一个电机)。下面的说明介绍了如何配置电调以使用正确的波特率和每个电调的单独 ID。
最初可以通过以下方法测试电调是否可以按照出厂配置旋转:
断开(飞行)控制器 CAN1 端口上任何其他 DroneCAN 设备的连接
连接(飞行)控制器并设置 CAN_P1_BITRATE 至 500 000
重启(飞行)控制器
接通电调电源,它们应该会停止鸣叫
使用Mission Planner地面站的 "设置"、"可选硬件"、"电机测试 "页面的 "测试所有电机",所有电机都应旋转
接下来校正每个电调的配置:
确保(飞行)控制器的 CAN_P1_BITRATE 参数设置为 500,000(如果修改,请重启(飞行)控制器)
下载并安装 DroneCAN Gui (版本 1.2.25 或更高)
确定(飞行)控制器的 MAVLink 或 SLCAN COM 端口。更多详细信息请参阅 DroneCAN GUI 页面.
打开 DroneCAN GUI
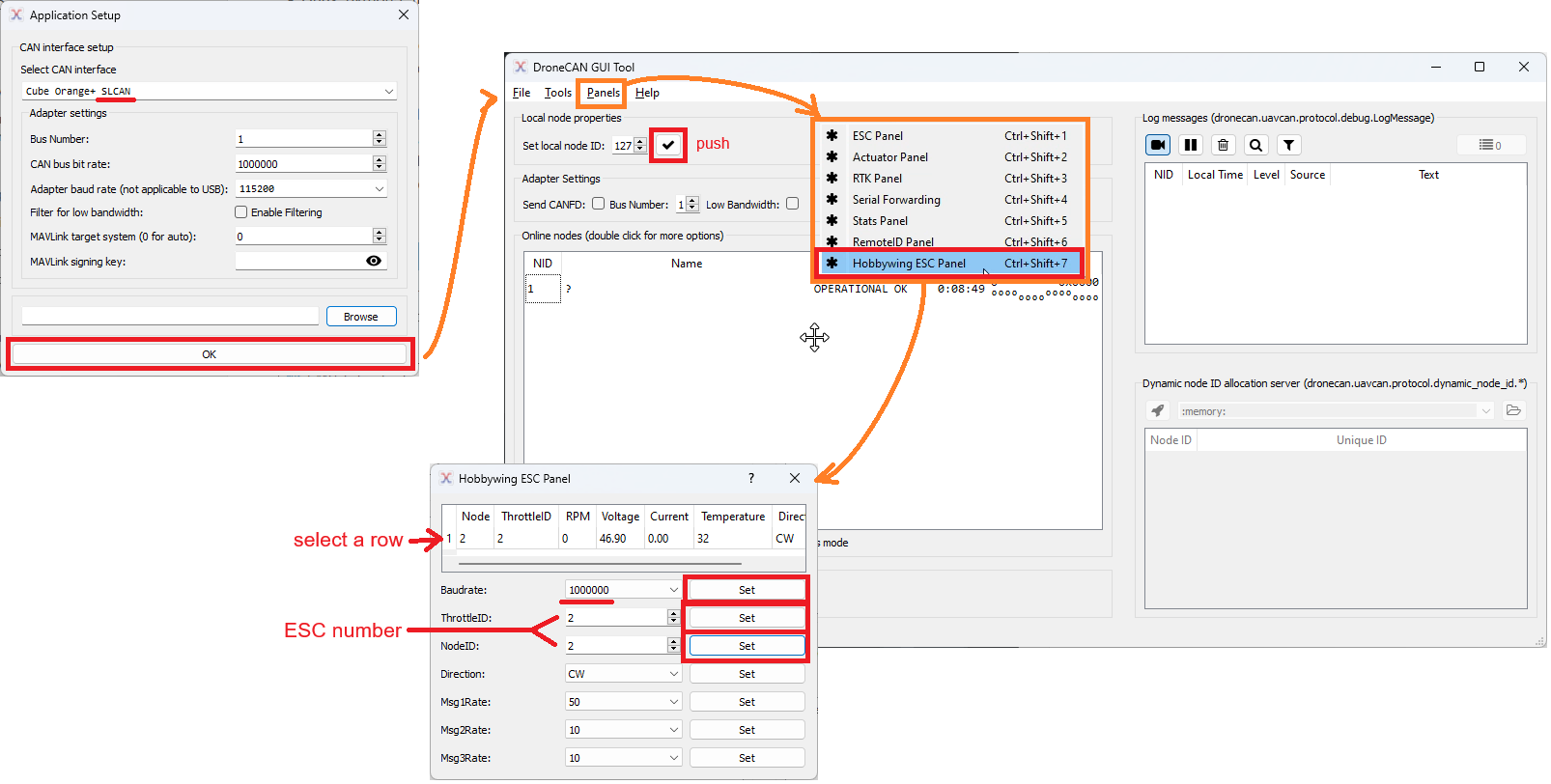
连接至 MAVLink 或 SLCAN COM 端口
按下 "设置本地节点 ID "字段旁边的复选按钮
选择面板,Hobbywing ESC 面板
从顶部表格中选择一个 ESC
将波特率设为 1,000,000
将 ThrottleID 和 NodeID 设置为 ESC 编号。该 ESC 编号对应于(飞行)控制器的伺服/PWM 输出端口编号
顶部表格中的数值应在几秒钟内更新
您可以选择设置 Msg1Rate(向自动舵发送转速的速率)和/或 Msg2Rate(电压、电流温度)。注意 Msg1Rate 必须大于 Msg2Rate。
对每个电调重复
连接(飞行)控制器并设置 CAN_P1_BITRATE 回到100万
测试¶
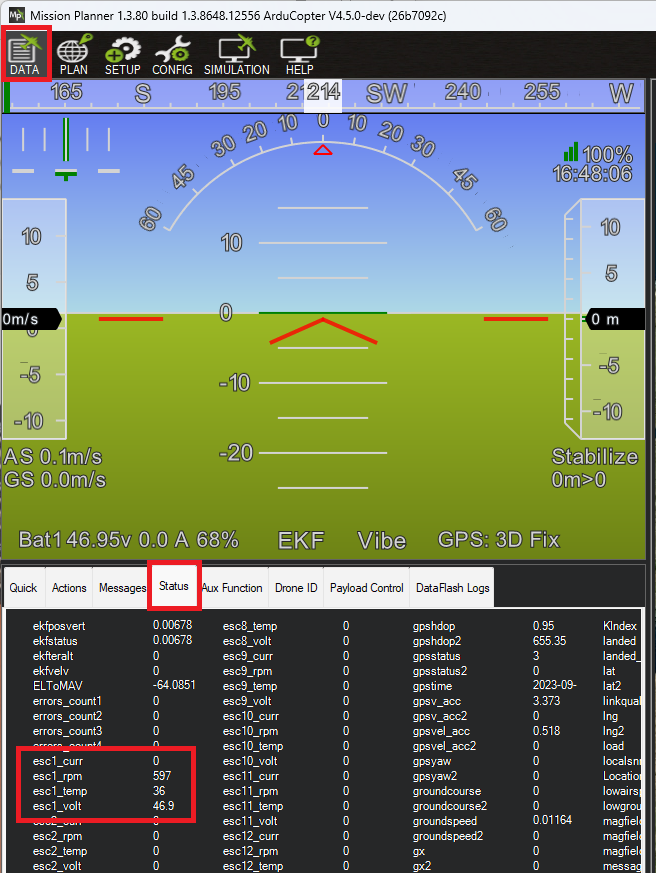
连接后,电调的转速、电压、电流和温度将在地面站中显示,并记录在机载日志中。下图显示了数据在Mission Planner地面站状态屏幕上的显示位置。
使用Mission Planner地面站的 "设置"、"可选硬件"、"电机测试 "页面测试每个电机是否正常旋转