OpenPilot Revolution 和 RevoMini¶
图片和部分内容由 LibrePilot 维基百科
规格¶
处理器
STM32F405RGT6 ARM Cortex-M4 微控制器
168 Mhz/1 MB 闪存
传感器
InvenSense MPU6000 IMU(加速度、陀螺仪)
霍尼韦尔 HMC5883L 罗盘
MS5611 气压计
电源
通过电调连接为全尺寸革命提供 4.8V ~ 10V 输入电源
RevoMini 最大电压为 5V
默认接口
8 个 PWM 输出(1 - 6 在 PWM 输出引脚上,7 & 8 在 Flex-IO / RCInput 端口上)
Flex-IO / RCInput 端口 CH3 引脚上的 RC 输入(需要 PPM/sBus)(全尺寸革命中为黄线)
用于电池电压和电流监控的模拟数字输入(在参数中设置针脚 12、11),可在任意针脚上设置更多 ADC
Flexi 端口上的 GPS(SERIAL3)
主端口上的遥测 (SERIAL1)
USB (SERIAL0)端口
用于闪存和调试的 SWD 端口,包括用于可选外设的 3.3V 输出
用于集成 HopeRF RFM22B 100mW 433MHz 的 MMCX 天线连接器(仅限全尺寸革命版)
RevoMini 上的 OPLink 端口。ArduPilot 不支持 OPLink 硬件,但该端口暴露了外部 SPI 引脚(SCK、CS、MOSI、MISO),可用于受支持的 SPI 外设,如 SD 卡适配器或 SPI OSD 突破板(需要添加硬件定义文件和编译自定义固件)。
备注
该硬件不支持每通道 PWM 型 RC 输入。有关 支持的遥控系统
默认 UART 顺序¶
SERIAL0 = 控制台 = USB
SERIAL1 = 遥测1 = 主端口
SERIAL2 = 默认配置中的 NN
SERIAL3 = GPS1 = FlexiPort
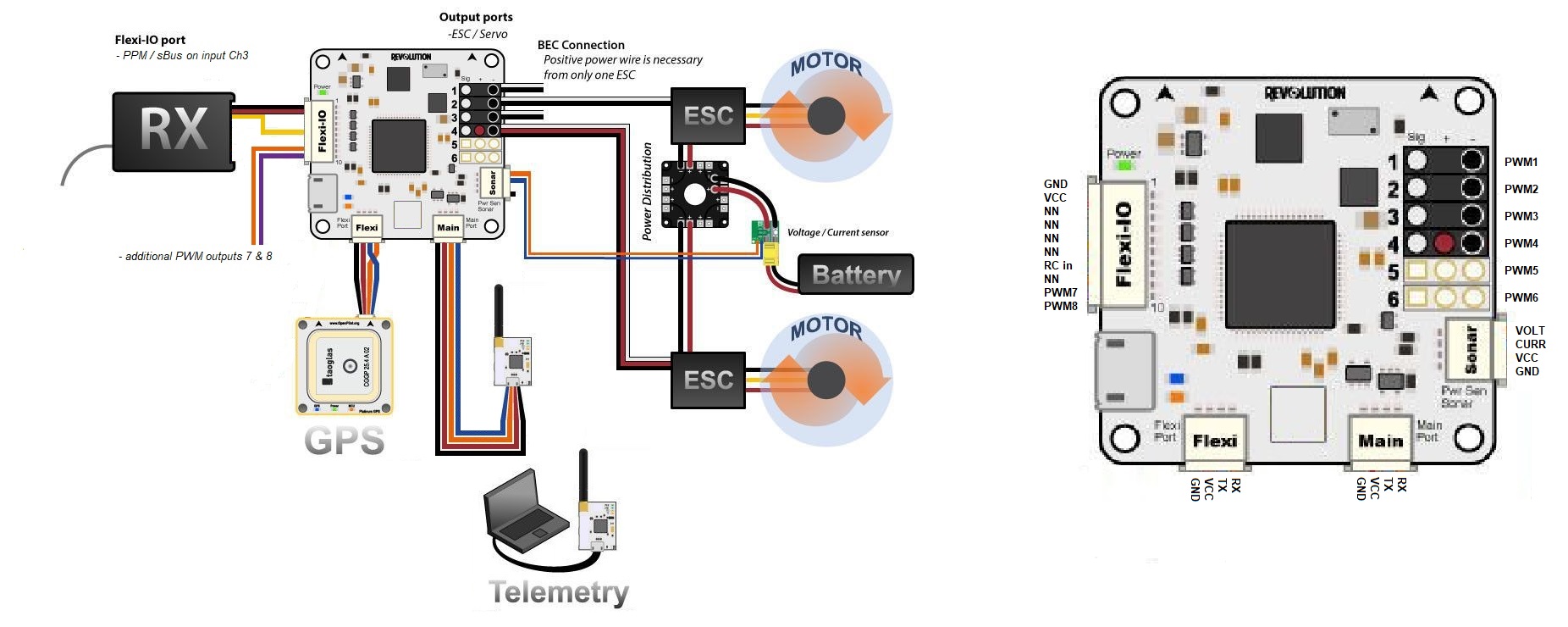
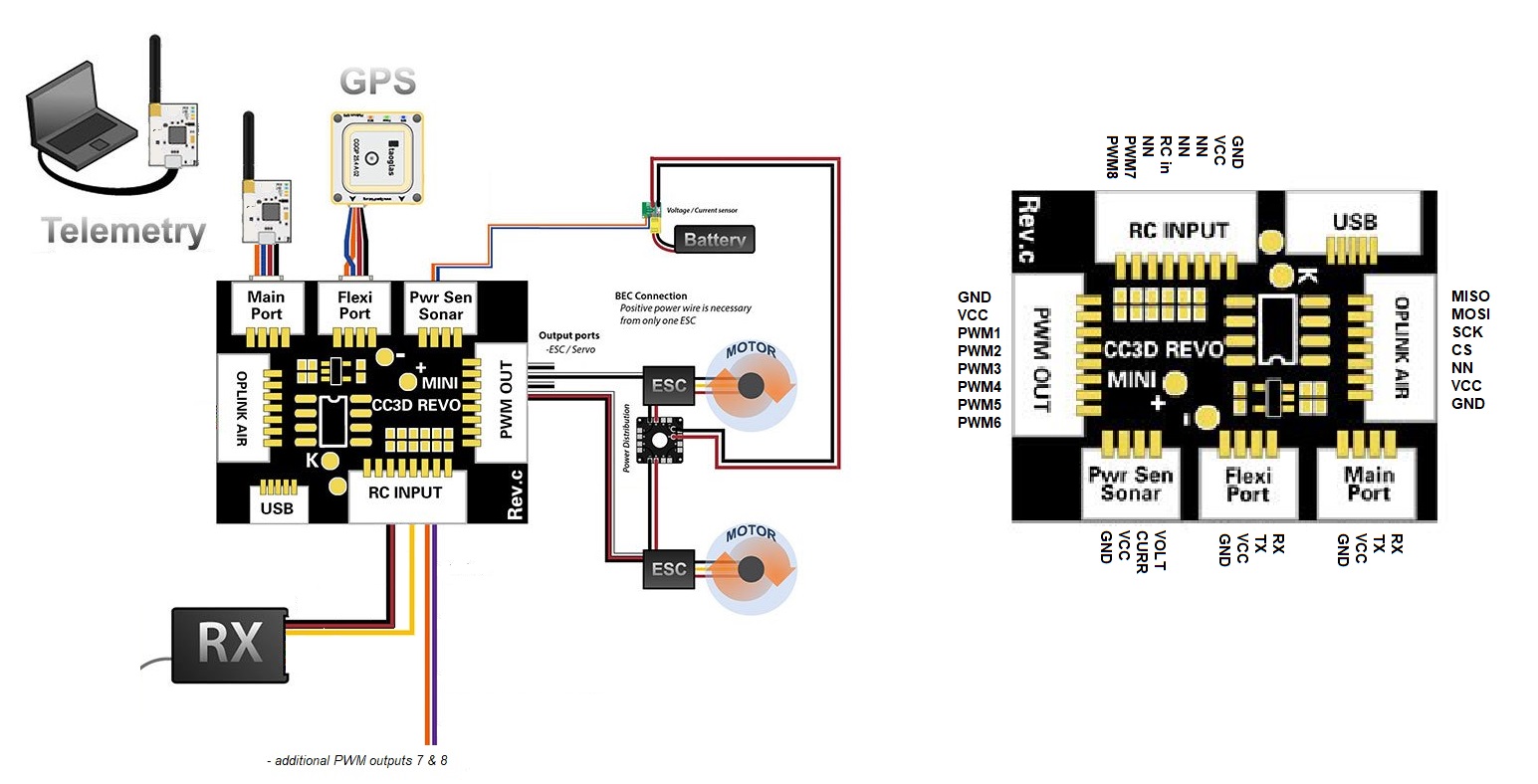
接线图¶
全尺寸 Revolution 和 RevoMini 上的 ArduPilot 默认引脚分配
可选连接¶
需要根据对 hwdef 的修改编译定制固件
Flexi 端口上的 I2C
RevoMini 的 OPLink 端口可用于连接外部 SPI 外围设备
在某些限制条件下,任意引脚可用于各种连接,如第二个 GPS、额外的 PWM 输出等。
RevoMini 可能是支持 ArduPilot 的占地面积最小的(飞行)控制器硬件。它不提供 CAN 总线连接,也没有足够的板载内存来存储相关记录数据。不过,只需付出有限的努力即可添加外部 I2C 或 SPI 外围设备。

购买地点¶
可在许多零售商处购买,包括 HobbyKing.
固件处理¶
ArduPilot 稳定版支持 Revolution 和 RevoMini。固件文件 这里
首次闪存 ArduPilot 需要在 DFU 模式下启动设备,以闪存与 ArduPilot 兼容的引导加载程序和固件文件。
进入 DFU 模式¶
为此,您需要找到并短接设备上的两个焊盘。在全尺寸革命上,它们被指定为 "SB "或 "SBL":
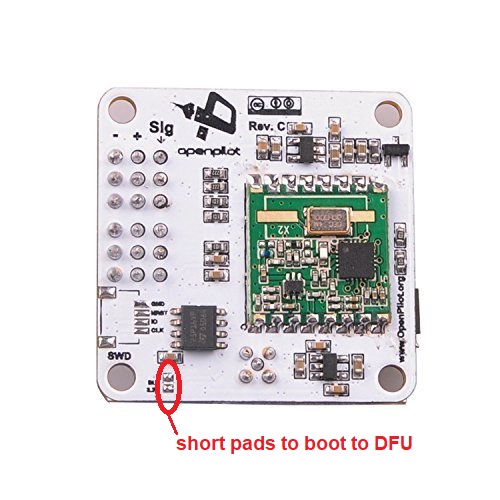
在 RevoMini 上,它们位于此处:
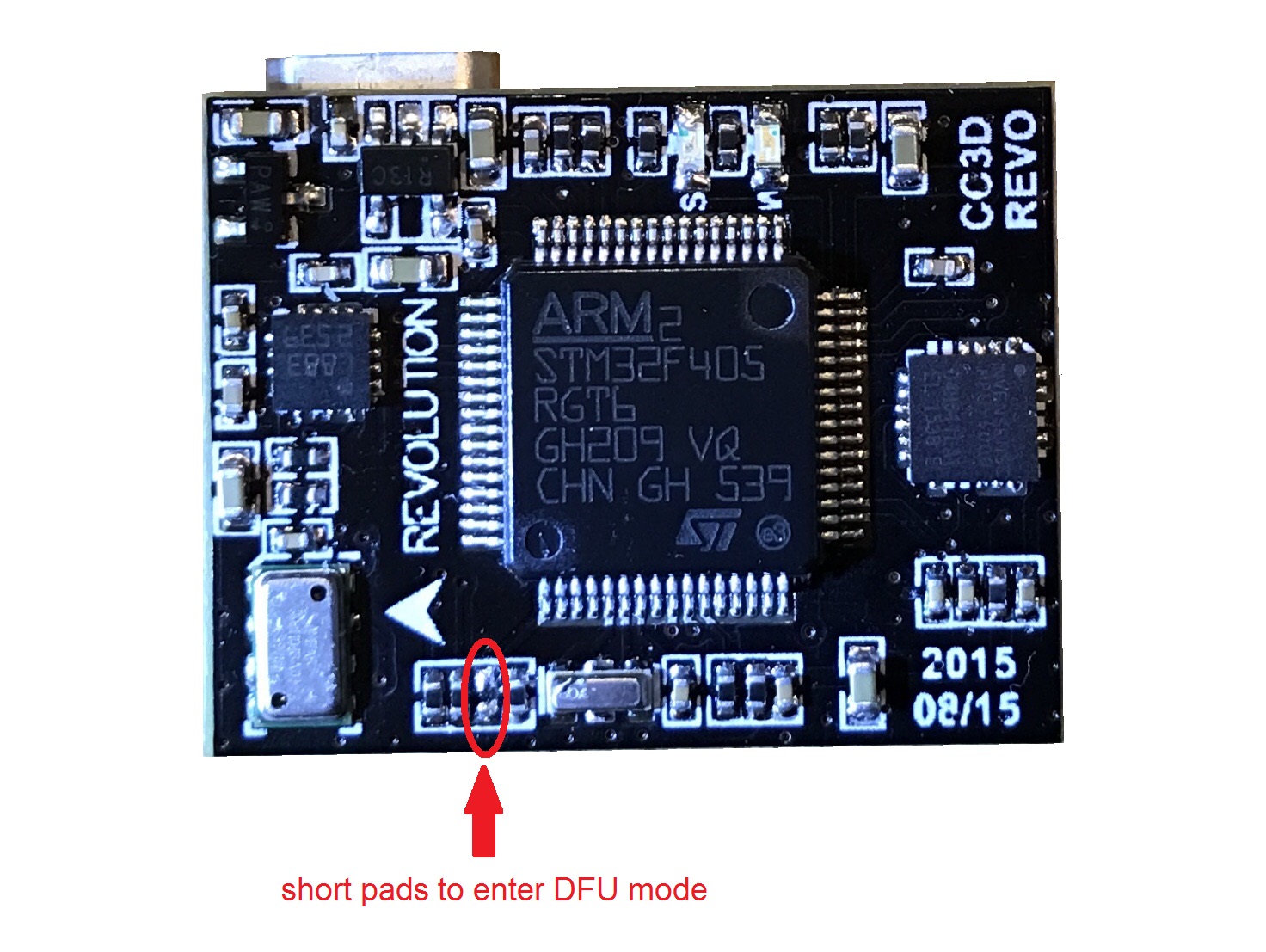
您可以以任何特定方式(用导线、焊点或其他方式)短接焊盘。详细说明见 Revo Mini LibrePilot 维基百科.用一根小导线短接设备是最简单的方法。如果使用导线,也可以先通过 USB 为设备供电,然后短接焊盘。设备进入 DFU 模式并连接到机器后,请继续执行以下步骤 将 ArduPilot 固件加载到 ChibiOS 电路板上.
编译 ArduPilot¶
要构建自己的固件,请参阅有关设置构建环境和编译源代码的说明: 构建代码