黑色立方体¶

系统功能¶
Cube Black (飞行)控制器是 Pixhawk (飞行)控制器的进一步发展。它专为希望将(飞行)控制器完全集成到系统中的商用系统和制造商而设计。除了 Pixhawk 的现有功能外,它还具有以下增强功能:
3 组 IMU 传感器提供额外冗余
2 套 IMU 采用机械隔振,减少了框架振动对状态估计的影响
IMU 通过板载加热电阻器进行温度控制,使 IMU 达到最佳工作温度
整个飞行管理单元(FMU)和惯性管理单元(IMU)安装在一个相对较小的外形尺寸(立方体)内。所有的输入和输出都通过一个 80 针 DF17 连接器,为商用系统制造商提供了一个插入式解决方案。制造商可以设计自己的载板,以满足其特定需求。
规格¶
处理器
32 位 ARM Cortex M4 内核,带 FPU
168 Mhz/256 KB RAM/2 MB 闪存
32 位故障安全协处理器
传感器
三个冗余 IMU(加速度计、陀螺仪和指南针)
InvenSense MPU9250、ICM20948 和/或 ICM20648 作为第一和第三个 IMU(加速度和陀螺仪)
ST Micro L3GD20+LSM303D 或 InvenSense ICM2076xx 作为备用 IMU(加速度和陀螺仪)
两个冗余 MS5611 气压计
电源
带自动故障切换功能的冗余电源
伺服轨道高功率(7 V)和大电流就绪
所有外设输出均受过流保护,所有输入均受 ESD 保护
接口
14x PWM 伺服输出(8 个来自 IO,6 个来自 FMU)
S.Bus 伺服输出
用于 CPPM、Spektrum / DSM 和 S.Bus 的 R/C 输入
模拟/PWM RSSI 输入
5 个通用串行端口,2 个具有全流量控制功能
2 个 I2C 端口
SPI 端口(无缓冲,仅用于短电缆,不建议使用)
2 个 CAN 总线接口
3x 模拟输入(3.3V 和 6.6V)
高功率压电蜂鸣器驱动器(在扩展板上)
高功率 RGB LED(兼容 I2C 驱动器,仅外部连接)
安全开关 / LED
用于英特尔 Edison 的可选载板
Cube 连接器针脚分配¶
本节详细介绍了 The Cube 标准载板的引脚分配。还有其他类型的载板可供选择,有关特定载板的引脚分配,请参阅制造商页面。

TELEM1, TELEM2 端口
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CTS | +3.3V |
| 5(黑色) | RTS | +3.3V |
| 6(黑色) | 接地 | 接地 |
GPS1 端口
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | SCL I2C1 | +3.3V |
| 5(黑色) | SDA I2C1 | +3.3V |
| 6(黑色) | 按钮 | 接地 |
| 7(黑色) | 按钮 LED | 接地 |
| 8(黑色) | 接地 | 接地 |
GPS2 端口
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | SCL I2C2 | +3.3V |
| 5(黑色) | SDA I2C2 | +3.3V |
| 6(黑色) | 接地 | 接地 |
ADC
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | ADC 输入 | |
| 3(黑色) | 接地 | 接地 |
I2C2
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | SCL | +3.3(上拉) |
| 3(黑色) | SDA | +3.3(上拉) |
| 4(黑色) | 接地 | 接地 |
CAN1&2
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | CAN_H | +12V |
| 3(黑色) | CAN_L | +12V |
| 4(黑色) | 接地 | 接地 |
POWER1
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2 (红色) | VCC | +5V |
| 3(黑色) | 当前 | 高达 +3.3V,引脚 3 |
| 4(黑色) | 电压 | 最高 +3.3V,引脚 2 | 5(黑色) | 接地 | 接地 | 6(黑色) | 接地 | 接地 |
POWER2
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2 (红色) | VCC | +5V |
| 3(黑色) | 当前 | 高达 +3.3V,第 14 针 |
| 4(黑色) | 电压 | 高达 +3.3V,第 13 针 | 5(黑色) | 接地 | 接地 | 6(黑色) | 接地 | 接地 |
USB
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | D_plus | +3.3V |
| 3(黑色) | D_minus | +3.3V |
| 4(黑色) | 接地 | 接地 |
| 5(黑色) | 蜂鸣器 | 电池电压 |
| 6(黑色) | 启动/错误 LED |
RSSI 输入
模拟/PWM RSSI 输入为 103 针
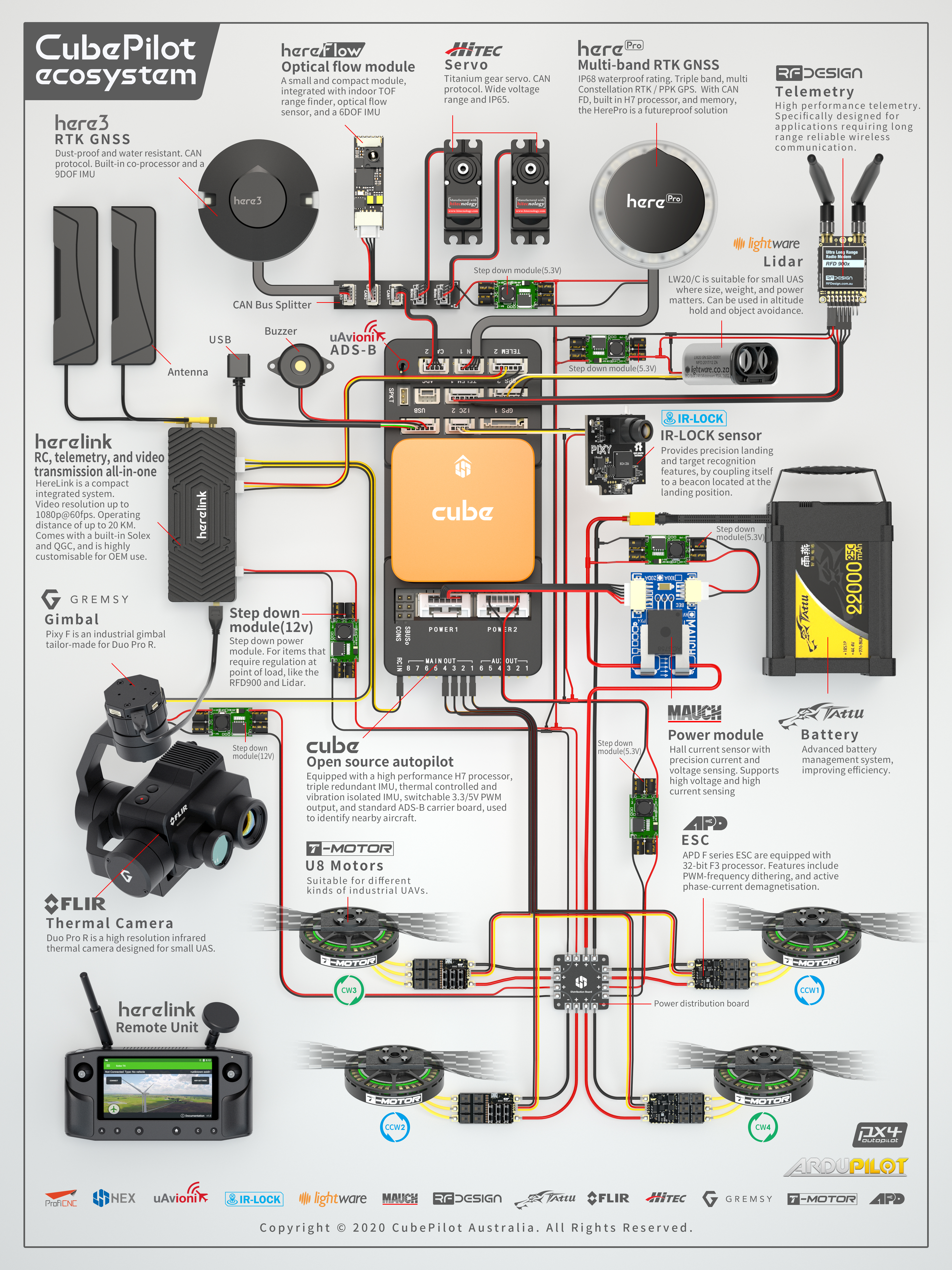
Cubepilot 生态系统¶
更多信息¶
有关设置和使用 Cubepilot 系统的更多信息和说明,请参见 Cubepilot 文档
有关 cubepilot 系统的技术帮助和支持,请参见 Cubepilot 论坛
有关 Cubpilot 的公司信息,请访问 www.proficnc.com
载板设计¶
购买地点¶
官方零售商名单 这里.
更多图片¶
