圣布鲁杜兰达尔¶

Durandal 是 Holybro 成功的(飞行)控制器系列的最新升级版。它由 Holybro 设计和开发,经过优化,可运行最新的 ArduPilot 固件。它采用了 STM32H743 微处理器,这是意法半导体(STMicroelectronics®)最新的先进处理器技术,加上博世(Bosch®)和 InvenSense® 的传感器技术,以及 ChibiOS 实时操作系统,为控制任何自动驾驶载具提供了令人难以置信的性能、灵活性和可靠性。Durandal 的微控制器现在拥有 2 MB 闪存和 1 MB RAM。
规格¶
处理器
32 位 STM32H743 主处理器
400Mhz / 1MB RAM / 2MB Flash
32 位协处理器
传感器
InvenSense ICM20689 加速计/陀螺仪
博世 BMI088 加速计/陀螺仪
MS5611 气压计
IST8310 磁强计
电源
工作电源:4.9~5.5V(最大输入电压 6V)
USB 输入:4.75~5.25V
高功率伺服轨道,最高 36V(伺服轨道不为(飞行)控制器供电)
双电压和电流监控输入
接口
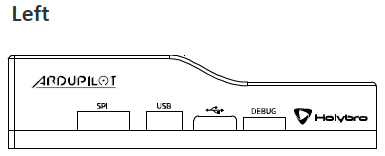
USB-C 和 JST_GH USB 端口
16 个 PWM 输出,其中 8 个可用作 GPIO 引脚
双电源模块输入
S.Bus 伺服输出
用于 CPPM 和 S.Bus 的 R/C 输入
DSM 输入端口
模拟/PWM RSSI 输入
5 个通用串行端口和调试端口
3 个 I2C 端口
启用 4x SPI 总线
2 个 CAN 总线端口
2x 额外模拟输入
安全开关/LED
其他
重量:64 克
内置 IMU 加热器,确保温度稳定
尺寸:80 毫米 x 45 毫米 x 20.5 毫米80 毫米 x 45 毫米 x 20.5 毫米
工作温度:-40 ~ 85°C(声称)
引脚¶
UART 映射¶
SERIAL0 -> USB
SERIAL1 -> UART2 (Telem1)
SERIAL2 -> UART3 (Telem2)
SERIAL3 -> UART1 (GPS)
SERIAL4 -> UART4(GPS2、Telem4/I2C)
SERIAL5 -> UART6 (Telem3)
SERIAL6 ->UART7(调试端口)
SERIAL7 -> USB2
Telem1、Telem2 和 Telem3 端口有 RTS/CTS 引脚,其他 UART 没有 RTS/CTS。
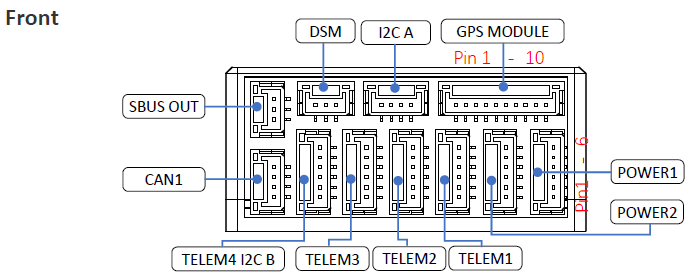
连接器¶
除非另有说明,所有连接器均为 JST GH
TELEM1、TELEM2、TELEM3 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | CTS | +3.3V |
| 5(黑色) | RTS | +3.3V |
| 6(黑色) | 接地 | 接地 |
GPS1 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | SCL I2C1 | +3.3V |
| 5(黑色) | SDA I2C1 | +3.3V |
| 6(黑色) | 按钮 | 接地 |
| 7(黑色) | 按钮 LED | 接地 |
| 8(黑色) | 3.3V | 3.3 |
| 9(黑色) | 蜂鸣器 | 接地 |
| (黑色) | 接地 | 接地 |
GPS2、Telem4/I2C 端口¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | TX (OUT) | +3.3V |
| 3(黑色) | RX (IN) | +3.3V |
| 4(黑色) | SCL I2C2 | +3.3V |
| 5(黑色) | SDA I2C2 | +3.3V |
| 6(黑色) | 接地 | 接地 |
SBUS 输出端口¶
SBUS 输出端口是一个连接到 IO 处理器的端口,可用于通过 SBUS 输出所有伺服通道。通过设置 BRD_SBUS_OUT 参数。
禁用 SBUS 输出时(通过设置 BRD_SBUS_OUT 为 0 时,可将该引脚用于接收器的模拟 RSSI 输入。要启用 RSSI 输入,需要设置
BRD_SBUS_OUT 0
RSSI_TYPE 1
RSSI_PIN 103
您不能同时拥有 SBUS 输出和模拟 RSSI 输入。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | 接地 | 接地 |
| 2 | 5v(电压伺服器) | +5.0V |
| 3 | TX (OUT) | +3.3V |
DSM/SPKT 端口¶
SPKT 端口为 Spektrum 卫星接收机提供了一个连接器。有了它,才能通过软件控制绑定卫星接收机。
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 | RX (IN) | +3.3V |
| 2 | 接地 | 接地 |
| 3 | 3.3v | +3.3V |
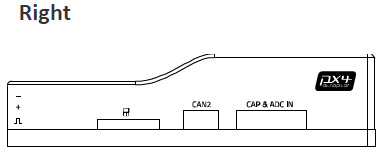
模数转换器/捕捉器¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | FMU_CAP6、AUX6、GPIO 55 | |
| 3(黑色) | FMU_CAP5、AUX7、GPIO 56 | |
| 4(黑色) | FMU_CAP4、AUX8、GPIO 57 | |
| 5(黑色) | FMU_CAP3、GPIO 60 | |
| 6(黑色) | FMU_CAP2,GPIO 59 | |
| 7(黑色) | FMU_CAP1,GPIO 58 | |
| 8(黑色) | ADC1_3V3(ADC 引脚 4) | |
| 9(黑色) | ADC1_6V6(ADC 引脚 18) | |
| 10(黑色) | 接地 | 接地 |
I2C¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | SCL | +3.3(上拉) |
| 3(黑色) | SDA | +3.3(上拉) |
| 4(黑色) | 接地 | 接地 |
CAN1&2¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | CAN_H | +12V |
| 3(黑色) | CAN_L | +12V |
| 4(黑色) | 接地 | 接地 |
功率1&2¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2 (红色) | VCC | +5V |
| 3(黑色) | 当前 | 高达 +3.3V |
| 4(黑色) | 电压 | 高达 +3.3V | 5(黑色) | 接地 | 接地 | 6(黑色) | 接地 | 接地 |
USB¶
| 针脚 | 信号 | 伏特 |
|---|---|---|
| 1 (红色) | VCC | +5V |
| 2(黑色) | D_minus | +3.3V |
| 3(黑色) | D_plus | +3.3V |
| 4(黑色) | 接地 | 接地 |
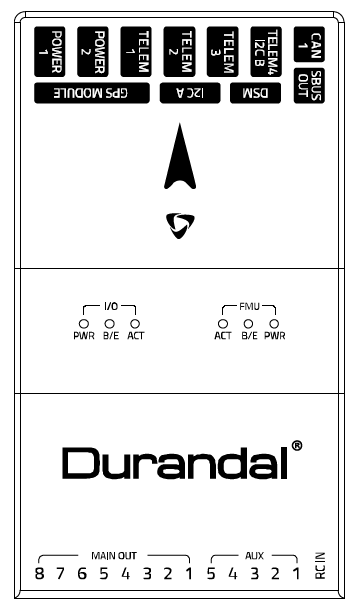
RC 输入¶
RC 输入配置在伺服轨道一端的 RCIN 引脚上,上图中标有 RCIN。该引脚支持所有遥控协议。此外,还有一个专用的 Spektrum 卫星端口,支持软件电源控制,允许绑定 Spektrum 卫星接收器。
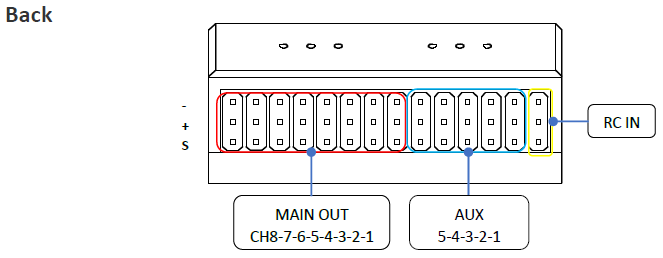
PWM 输出¶
Durandal 支持多达 16 路 PWM 输出。前 8 个输出(标为 "MAIN")由专用的 STM32F100 IO 控制器控制。这 8 个输出支持所有 PWM 输出格式,但不支持 DShot。
其余 8 个输出(标为 AUX1 至 AUX8)为 "辅助 "输出。这些输出直接连接到 STM32H743,支持所有 PWM 协议和 DShot。
所有 13 个背面 PWM 输出上排为接地,中排为 5V,下排为信号。
8 个主要 PWM 输出分为 3 组:
第 1 组中的 PWM 1 和 2
第 2 组 PWM 3 和 4
第 3 组中的 PWM 5、6、7 和 8
8 个辅助 PWM 输出分为 2 组:
第 4 组中的 PWM 1、2、3 和 4
第 5 组中的 PWM 5 和 6
PWM 7 和 8 在第 6 组(无 DMA,无 DShot)
同一组内的通道需要使用相同的输出率。如果一个组中的任何通道使用 DShot,那么该组中的所有通道都需要使用 DShot。
电池监测¶
电路板上有两个专用的电源监控端口,均为 6 针连接器。正确的电池设置参数取决于所连接的电源砖类型。
指南针¶
Durandal 有一个内置 IST8310 罗盘。
GPIO¶
8 个 AUX PWM 端口可用作 GPIO(继电器、按钮、RPM 等)。要使用这些端口,需要通过设置 BRD_PWM_COUNT 例如,如果设置为 6,PWM7 和 PWM8 将可用作 GPIO。
备注
在固件 4.2 及更高版本中,将 PWM/SERVO/MOTOR 输出设置为 GPIO 功能的方法有所改变。而不是 BRD_PWM_COUNT 个人 SERVOx_FUNCTION 参数仅设置为"-1"。如果设置为 "0",则仍为 PWM 输出,未指定功能,并在电路板安全未激活时输出该输出的微调值。如果舵机功能被 "镜像 "到远程设备(如 DroneCAN 或 KDECAN ESC),那么要将自动驾驶板的相应输出引脚改为 GPIO,但允许 SERVOx_FUNCTION 仍分配给远程设备,则 servo_gpio_mask 参数可用于将电路板引脚指定为 GPIO,而不影响 SERVOx_FUNCTION 远程设备的分配。
ArduPilot 中 PIN 变量的 GPIO 编号为
PWM1 50
PWM2 51
PWM3 52
PWM4 53
PWM5 54
PWM6 55
PWM7 56
PWM8 57
模拟输入¶
Durandal 有 7 个模拟输入端
ADC 引脚 16 -> 电池电压
ADC 引脚 17 -> 电池电流传感器
ADC 引脚 14 -> 电池 2 电压
ADC 引脚 15 -> 电池 2 电流传感器
ADC 引脚 4 -> ADC 端口引脚 8(3.3V 限制)
ADC 引脚 18 -> ADC 端口引脚 9(6.6V 限制)
ADC 引脚 9 -> RSSI 输入
ADC 引脚 10 -> 5V 检测
ADC 引脚 11 -> 3.3V 检测
IMU 加热器¶
Durandal 中的 IMU 加热器可以用 BRD_HEAT_TARG 参数,单位为摄氏度。
加载固件¶
电路板预装了与 ArduPilot 兼容的引导加载器,可通过任何与 ArduPilot 兼容的地面站加载 *.apj 固件文件。
购买地点¶
快速入门¶
使用 Pixhawk 布线快速入门 作为一般指南。
致谢¶
感谢 [Holybro](http://www.holybro.com)的图像