Nooploop TOFSense P¶
备注
4.5 及更高版本的固件支持该传感器。
"这款" TOFSense P/PS 是一种轻型测距模块,可提供快速、精确的距离测量,最远可达 8 米。它的视场角(FOV)可调,从 15 度到 27 度不等,测量分辨率为 1 毫米。ArduPilot 目前通过 UART 和 CAN 支持该传感器。
连接(飞行)控制器¶
该传感器可通过 UART 或 CAN 接口连接。
通过 UART 连接¶
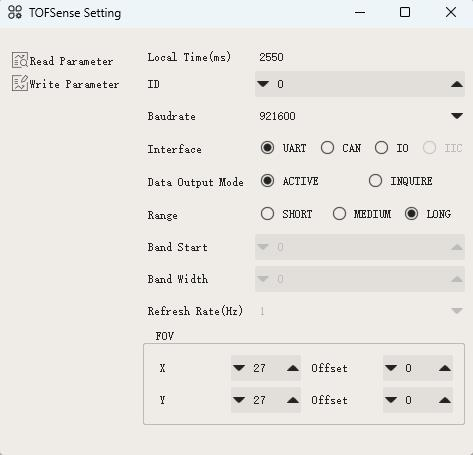
通过制造商提供的 NAssistant 软件设置传感器。更多详情请见 这里.对于 UART 模式,在设置屏幕中将 "接口 "设为 UART,波特率正确,模式设为 "活动"。建议将波特率从默认的 921600 降到一个较小的选项(例如:230400)。
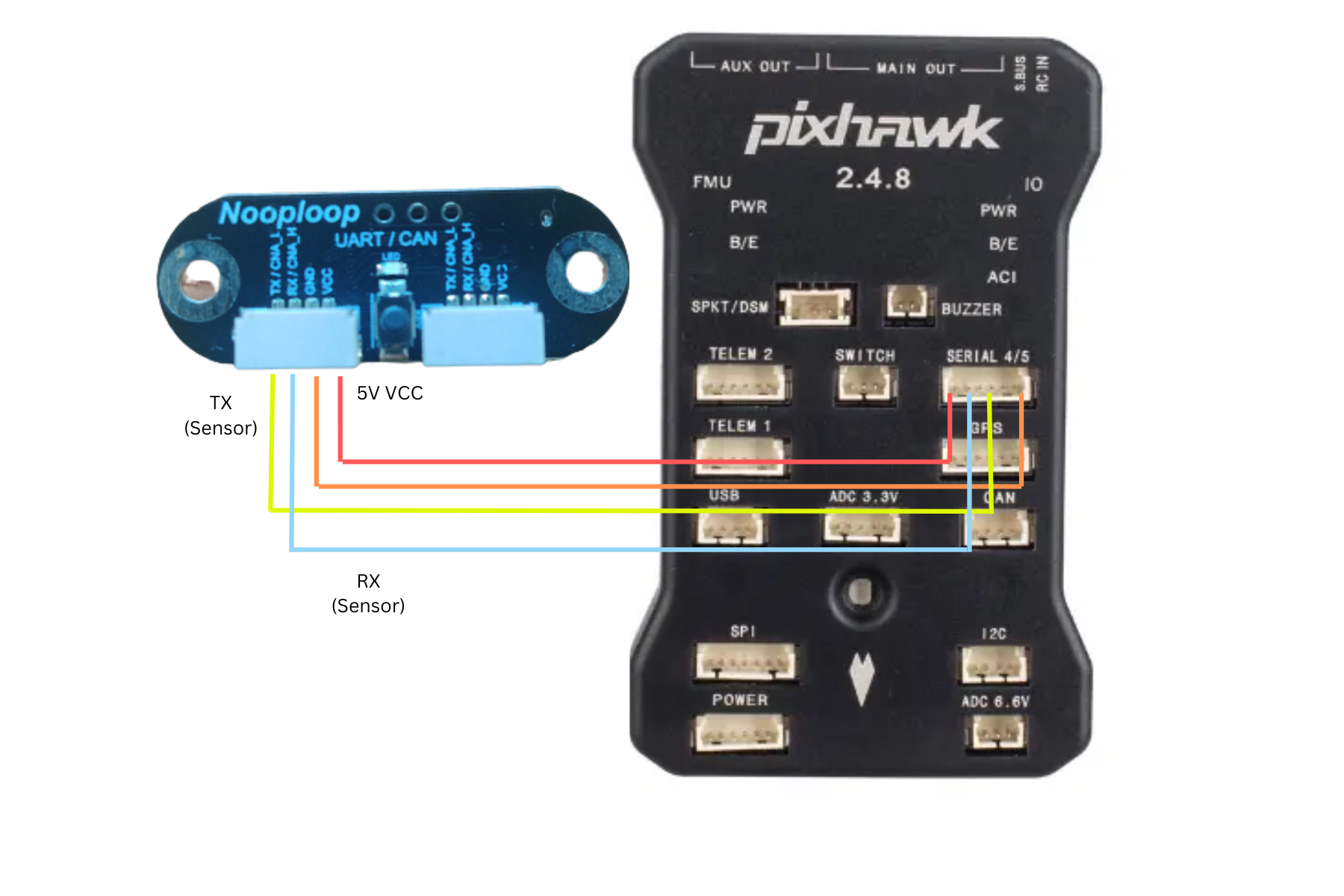
您可以使用任何备用的(飞行)控制器串行/UART 端口。下图显示了如何连接 SERIAL4,示例参数将假定使用该串行端口。
设置以下参数:
serial4_protocol = 9(激光雷达)
SERIAL4_BAUD = 230400(或在助理 NAssistant 中设置的值)
RNGFND1_TYPE = 37 (NoopLoop_TOFSense) 设置后重新启动。
RNGFND1_MAX_CM = 800(即最大射程为 8 米)
RNGFND1_MAX_CM = 2
通过 CAN 连接¶
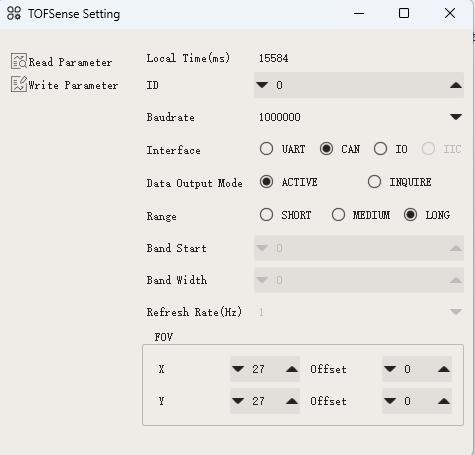
通过制造商提供的 NAssistant 软件设置传感器。更多详情请见 这里.对于 CAN 模式,在设置屏幕中将 "接口 "设为 CAN,模式设为 "活动",比特率设为 "1000000"。如果计划在一条 CAN 总线上使用多个 TOFSenseP,也可以将 "ID "设置为唯一的数字。将 ID 设置为 0 将接受所有 ID。
备注
ArduPilot 目前不支持将这些测距仪的多个实例连接到不同的 CAN 端口。如果您想同时使用多个 CAN 测距仪,请将它们连接到同一总线上。
警告
传感器的 4 针 JST-GH 连接器接线与大多数(飞行)控制器的 CAN 接线不匹配。错误接线可能导致传感器和/或(飞行)控制器损坏。
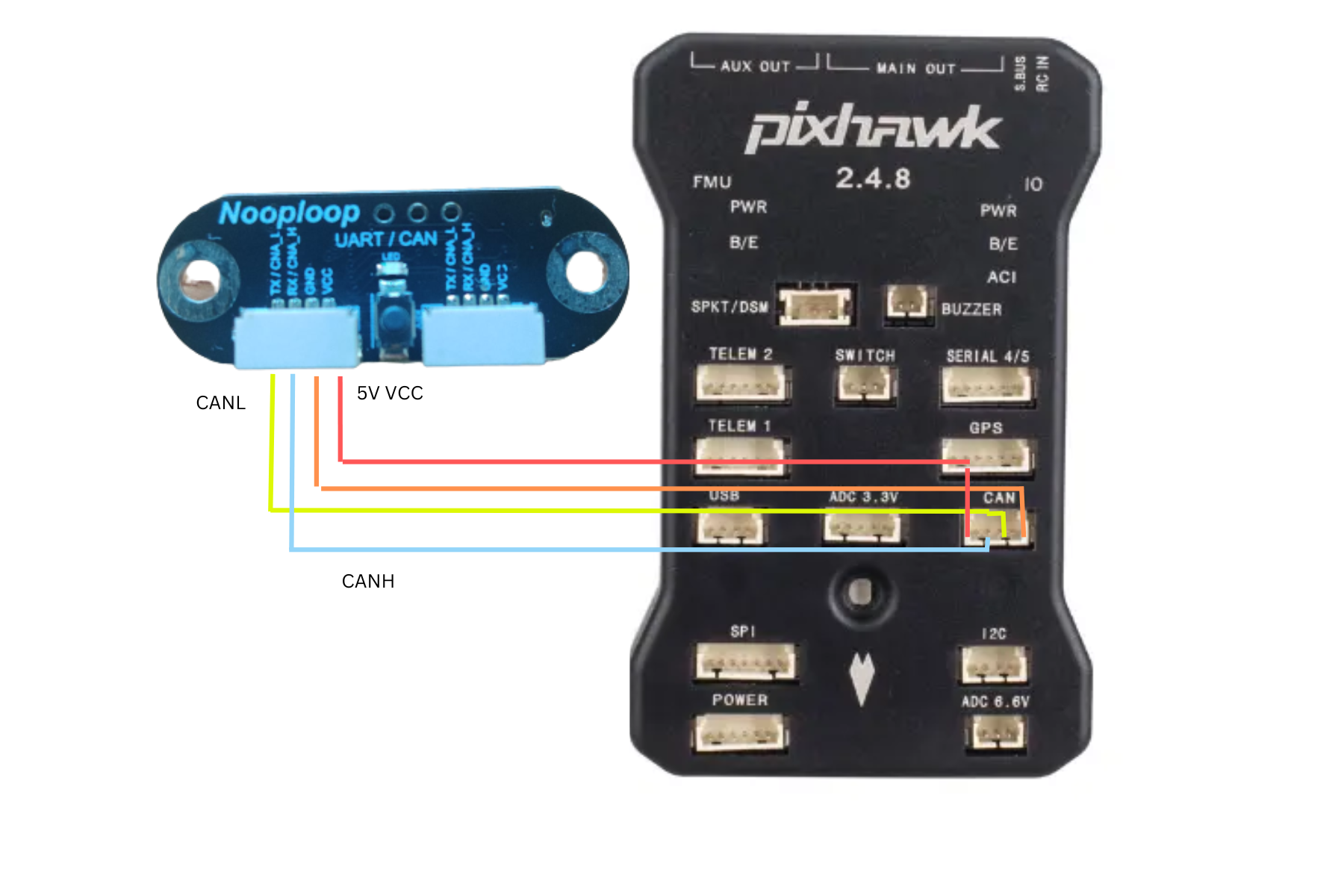
对于 CAN 连接,您可以使用任何备用 CAN 端口。由于这不是基于 DroneCAN 的传感器,因此您不能将所连接的端口用于任何其他类型的传感器。下图显示了如何连接 CAN2。
设置以下参数
CAN_P2_DRIVER = 1(启用 CAN 端口并使用驱动程序 2)
CAN_P2_BITRATE = 1000000(或在助理 NAssistant 中设置的值)
can_d2_protocol = 13(TOFSenseP 协议)
RNGFND1_TYPE = 38 (NoopLoop_TOFSense_CAN) 设置后重新启动。
RNGFND1_MAX_CM = 8000(即最大射程 8 米)
RNGFND1_MAX_CM = 2
rngfnd1_recv_id = 传感器 ID(0 表示接受来自所有 CAN 传感器 ID 的数据)
测试传感器¶
传感器读取的距离可在Mission Planner地面站飞行数据屏幕的状态选项卡中查看。查找 "测距仪 1"。