机器人伺服系统¶

Robotis Dynamixel 伺服器是相对昂贵的高端 "智能执行器",一旦连接到(飞行)控制器的串行端口,就可由 ArduPilot 控制。
Robotis 伺服器使用"机器人协议 2.0 版支持 "半双工异步串行通信"。请在每个伺服系统的 "硬件/软件规格 "部分查找 "半双工异步串行通信"。支持 XM430-W350-T 尤其是 ArduPilot。
备注
Copter-4.0、Plane-3.10 和 Rover-3.5(或更高版本)均支持这些伺服器
购买地点¶
配置伺服器¶
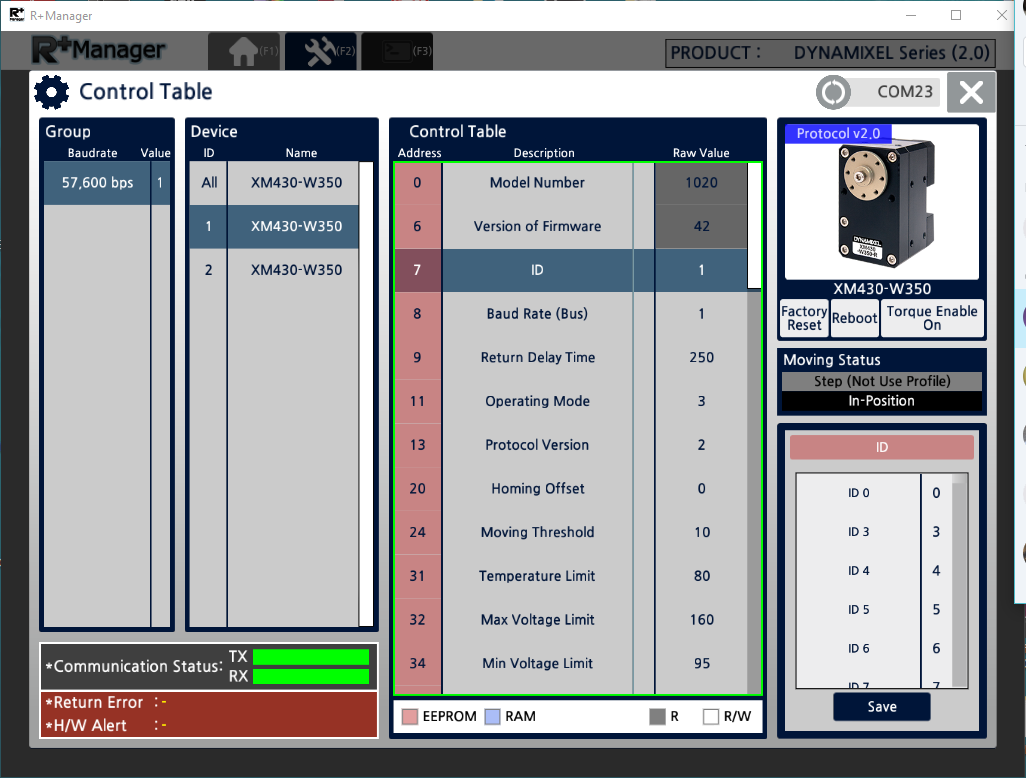
需要使用 R+ Manager 配置工具设置每个伺服的 ID。
动态影像向导 2.0 是最新的 Dynamixel 配置工具,支持 Windows / Linux / Mac OSX。
打开 robotis.us/roboplus2 在网站的 "R+ Manager 2.0 "行,下载并安装 "2.0.1 Windows (exe)
如图所示,将 U2D2 安装到舵机上。 在线手册
启动 R+ 管理器,连接到相应的 COM 端口,并将每个伺服的 ID 设置为 1 至 16 之间的数值。为每个伺服选择的数字应与用于配置和控制伺服的伺服编号一致。例如,如果 ID 设置为 "9",则 SERVO9_MIN, SERVO9_MAX, servo9_function等参数将用于配置伺服系统。
连接和配置¶
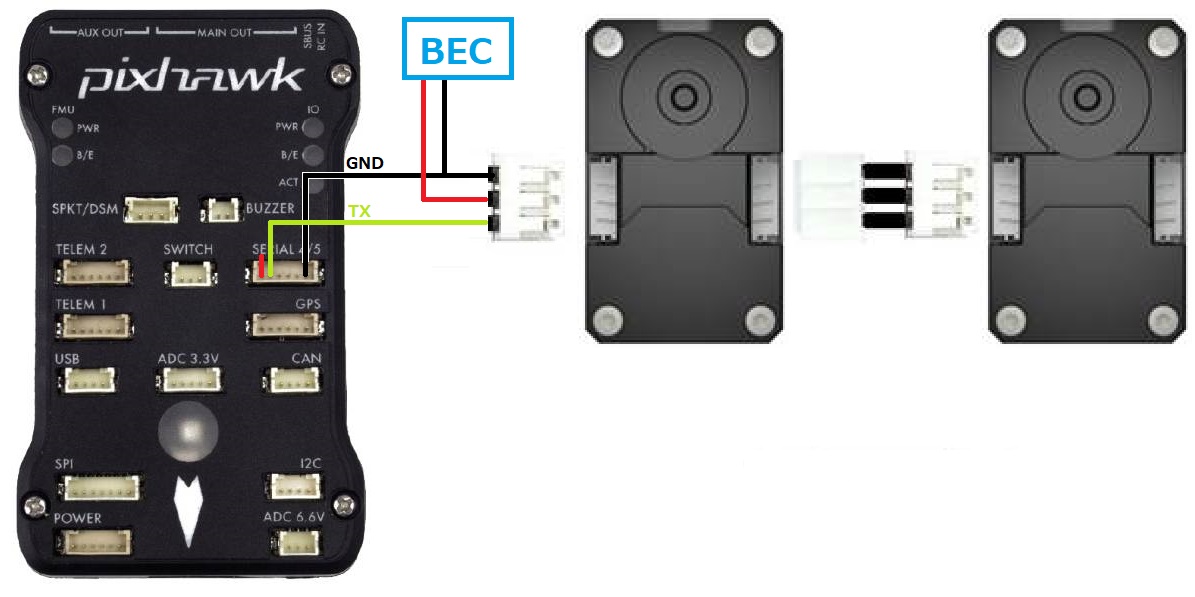
将一个舵机连接到(飞行)控制器上的任意串行端口。本例中使用的是 SERIAL4,但任何串行端口都可以使用
如上图所示,应通过菊花链将其他伺服器连接到第一个伺服器上
在(飞行)控制器上设置以下参数
serial4_protocol = 19 ("RobotisServo")
SERIAL4_BAUD = 57(57600 波特)
serial4_options = 4 启用半双工模式
使用Mission Planner地面站进行测试¶
Mission Planner地面站的 "飞行数据 "屏幕右下方有一个 "舵机 "选项卡,可用于测试舵机是否正确移动。
