高级 Pixhawk 四旋翼飞行器接线图¶
Jethro Hazelhurst 为我们制作了这张精美的四旋翼飞行器 Pixhawk 接线图。(其他(飞行)控制器的接线方式类似)
(控制滚轮可以放大下面的图片!)。
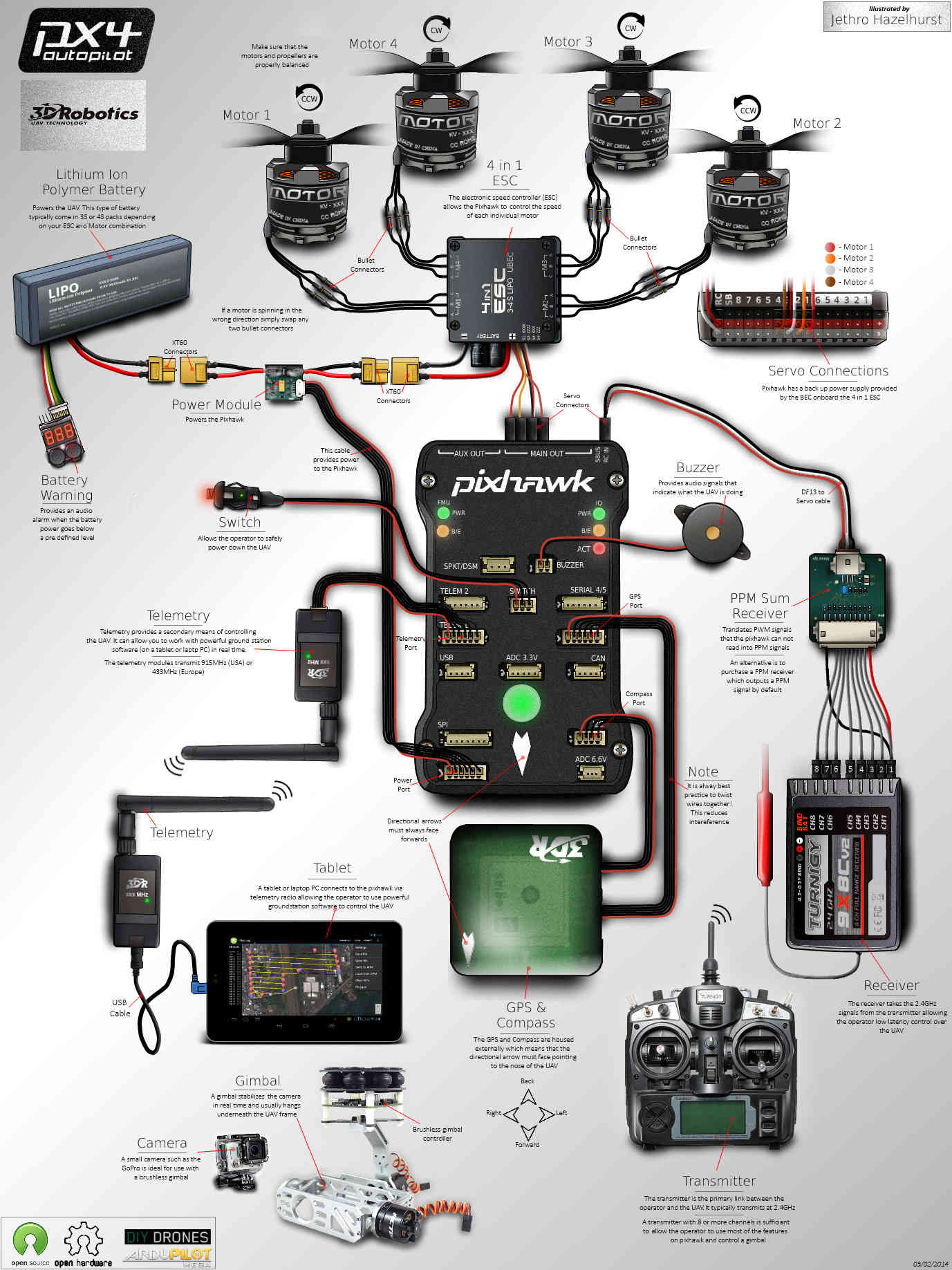
本图表说明了四旋翼飞行器的各种选项。¶
使用 4 合 1 电子调速器代替单个电子调速器,可减少电磁场,使安装更简洁,且无需配电板。
四旋翼飞行器机架位置的默认实际电机编号如下所示,需要进行适当的信号和电机布线。可以通过调整"...... "来更改电机编号的输出分配。
SERVOx_FUNCTION(飞行)控制器各 "x "输出端的值。请注意,下面显示的 AUX1-6 输出分别对应 SERVO9 - SERVO14。

图示为带有传统接收器的 3DR PPM-Sum 编码器。可使用任何与 ArduPilot 兼容的接收器。参见 无线电控制系统 以获得更多选择。
一般来说,3S 或 4S LiPo 电池适用于四旋翼飞行器,图中所示的 XT60 连接器是可靠的选择。
可选的电池警告指示器可快速显示电池状态,并在附近发出声音警告。
可选的 3DR 遥测无线电可连接到(飞行)控制器和平板电脑或笔记本电脑,以便进行实时监控和操作。
GCS (地面控制站)程序,如 Mission Planner、AndroPilot 或 DroidPlanner,可提供飞行信息和控制。
图中展示了可选配的 GoPro 摄像机和无刷云台,可提供非常高质量的照片和视频效果。
在 400 或更大的四旋翼飞行器上使用 GoPro 摄像机和无刷云台是非常合理的。
无刷相机万向节的性能比老式伺服型万向节更平稳、更充分。
上图中的无刷云台配有防震支架,这对获得良好的拍摄效果非常重要。
对于大于 GoPro 或 "运动 "类型的相机,应使用较大的四旋翼、六旋翼或八旋翼旋翼飞行器。
您还可以安装可选的 FPV(第一人称视角)视频系统,但上图中没有显示。
FPV 系统由旋翼飞行器上的微型摄像机和发射器、接收器、护目镜或液晶屏组成。
几乎任何尺寸的四旋翼飞行器都能支持第一人称视角系统。
可选的 OSD(屏幕显示)可在 FPV 飞行显示屏上添加当前飞行条件的视频抬头显示。
上面提到的遥测、摄像头、云台、FPV 和 OSD 选项可以根据您的需要进行组合,但要从简单的开始。