为 Pixhawk 供电¶
本文将介绍如何为 Pixhawk.
概述¶
对于大多数用户来说,为 Pixhawk 供电非常简单,只需将一根 6 针 DF13 电缆从一个 支持的电源模块 如下图所示,将电源线插入 Pixhawk 的 "电源 "端口。
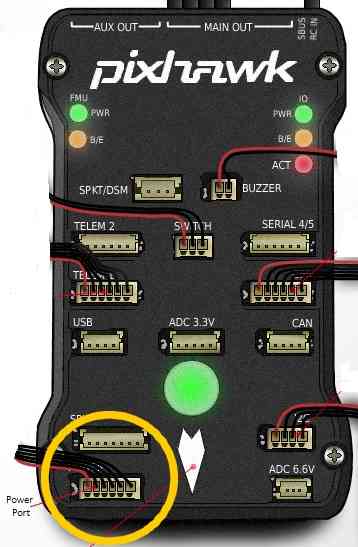
Pixhawk 电源端口¶
该模块将为 Pixhawk 提供稳定的 ~5V 电压,并允许 Pixhawk 测量主电池的电流和/或电压。根据电源模块的不同,您可能还需要连接备用电源和伺服轨道电源。
电源模块的类型也决定了可以使用多大的电池(大多数多旋翼飞行器在悬停时的电流小于 20 安培,全速飞行时的电流也很少超过 90 安培)。
警告
Pixhawk 确实 不 供应 为伺服轨道供电。舵机轨道的供电通常由电调或单独的电源完成,如 BEC(如图所示)。 接线概览如下).
提示
有些电源模块明确支持为舵机轨道供电、提供备用电源和支持较大的电池。使用这类模块意味着您无需考虑本文其余部分讨论的大多数布线问题。
警告
如果遥控接收机通过 3 芯伺服电缆连接到 Pixhawk 上的遥控连接器,则 Pixhawk 将为该接收机供电。如果该接收机还连接到 Pixhawk 上的 SBus 端口,通过 3 芯导线传输模拟 RSSI 信号,则有可能无意中通过无线电从主 PixHawk 电源输入端为伺服总线供电。
有些无线电设备(如 FRSky)会将 RC 输出电缆上接收到的电源通过模拟 RSSI 端口输出。而 PixHawk 伺服轨道电源总线包括 SBus +5v 引脚。
移除 RSSI 监控电缆的中心导体可避免通过遥控无线电接收器从错误(或多个)电压源为 Pixhawk 伺服总线供电。
通过伺服轨道供电/备份¶
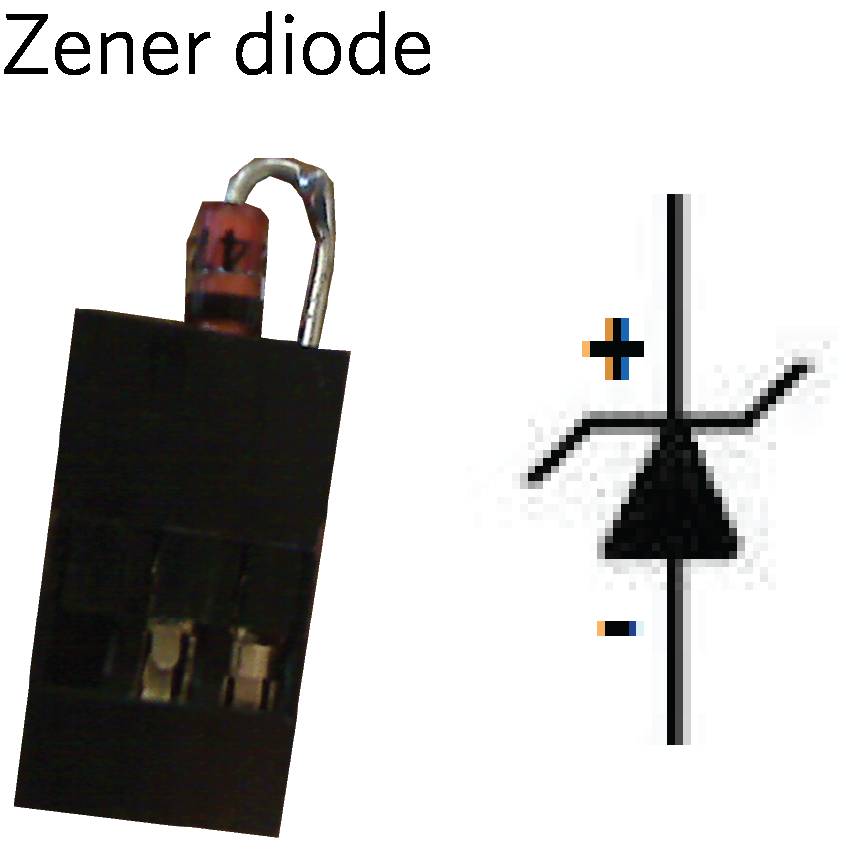
Pixhawk 可由伺服轨道供电,而不是由电源模块供电。这可以通过将 5V BEC(带或不带舵机)连接到 "主输出 "或 "辅助输出 "引脚的电源 (+) 引脚和接地 (-) 引脚来实现。您可以 必须 此外,还需添加一个齐纳二极管(零件号 1N5339)来调节跨轨电源,并将其限制在 5.7V 以下。

使用电源模块时,这种方法也可用作 Pixhawk 的备用电源。如果电源模块提供的电压过低(4V?请参阅 额定电压 有关为 Pixhawk 供电的更多信息,请参阅下面的章节。
警告
伺服轨可为伺服器提供高达 10.5V 的电压(但不能同时为 Pixhawk 供电)。高于 5V 的电压不能通过伺服轨为 Pixhawk 供电。在这种情况下,齐纳二极管 不得使用.
Pixhawk 电源/ESC 接线概述¶
下图是 Pixhawk 电源和电调布线的综合框图。在该图中,3DR 电源模块(或同等设备)通过其电源端口(主电源)为 Pixhawk 供电。一个电源就足够了,但如果电源模块无法为这个主电源供电,显然不是冗余电源。因此,图中通过连接到 Pixhawk 输出伺服轨的 5V BEC 增加了第二个备用电源。如果主电源出现故障,Pixhawk 将自动切换到第二电源。
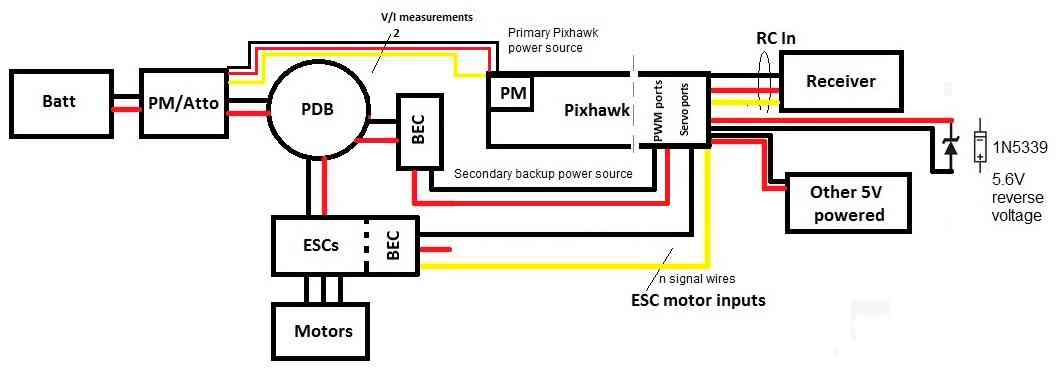
Pixhawk 电源/ESC 接线概述¶
图表缩略语:
PDB = 配电板。
PM = pixhawk 电源端口。
PM/Atto = 可选的 3DR 电源模块或 Attopilot 替代方案,用于高于 4S 的电池电压。
备注
想详细了解 Pixhawk 的电源布线? 单击此处了解有关将电调和舵机连接到 Pixhawk 的更多信息。
一般布线建议¶
请务必将接地参考线与 Pixhawk 伺服轨道(输出端口 1-8)上的电调信号线连接起来。事实上,电调的信号线绝不能在没有接地参考线的情况下处于浮动状态(任何设置都不需要连接信号接地线)。
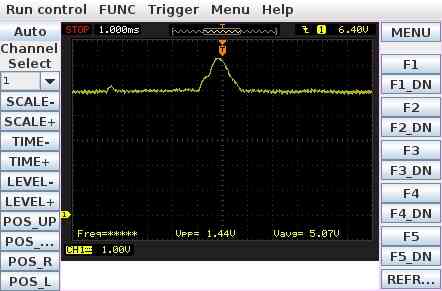
为 Pixhawk 供电很危险 只是 舵机轨上的电压,尤其是数字舵机。舵机可能会导致电压尖峰(如下图所示,当连接到 Pixhawk 的单个数字舵机快速移动时,示波器上显示的舵机轨电压)。关键在于数字舵机会导致导轨上的电压升至临界值 5.7V 以上。超过这一水平,Pixhawk 电源管理将切断 FMU 的电源,Pixhawk 将重新启动。 如果飞行时发生这种情况,你就会失去飞机。
当机箱从伺服轨道供电时,用户需要为机箱提供清洁的电源。舵机本身不够安静。
请勿将 BEC 电源连接至 RC IN 端口(接收机 PPM 输出端的黑色接地线、红色电源线和白色信号线连接至这些 RC 引脚)。
建议使用 5V 伺服系统并将伺服轨配置为备用电源的系统特别添加外部齐纳二极管。连接推荐的齐纳二极管,极性如图所示。使用尽可能短的导线,或者使用标准的 3 位 JR 伺服连接器,将二极管脚直接插入(并焊接)伺服母插针,效果会更好。作为二极管的补充,在二极管上并联一个电容器也很有用。电容器将平滑最终的电压波纹。与二极管的建议一样,电容器的连接线应尽可能短。电容器的尺寸不要过大。
高级电源配置¶
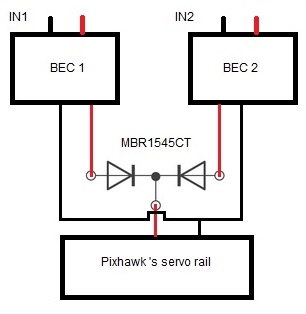
本节介绍如何设置三冗余电源(电源模块为主电源,两个备用 BEC)。
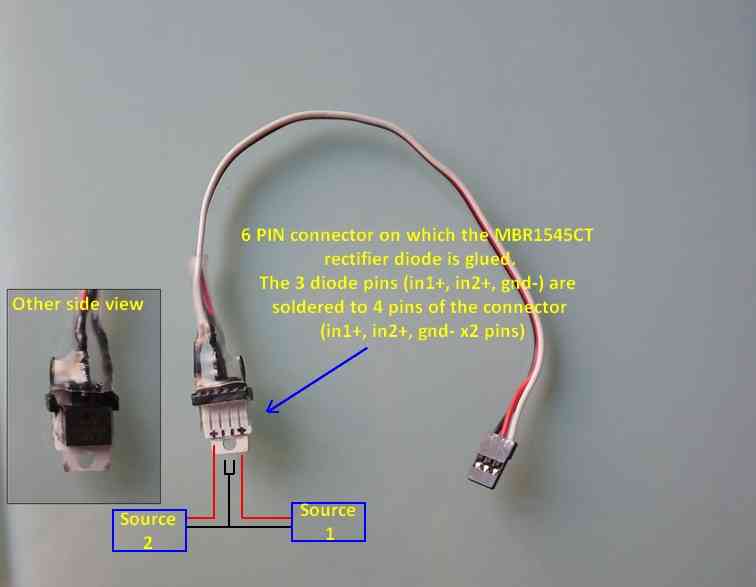
在此方案中,使用了一个简单的 MBR1545CT 集成电路。该电路在其输入端接收两个 BEC,并只输出电压最高的 BEC(例如,如果 BEC1 输出 5.25V,BEC2 输出 5.45V,则 MBR1545CT 将通过 BEC2 并阻断 BEC1)。下面是使用 MBR1545CT 集成电路和 6 针 JST 连接器实现的连接总线电路接线图和示例:
额定电压¶
如果提供三个电源,Pixhawk 可以实现三冗余供电。这三个轨道是电源模块输入、伺服轨输入和 USB 输入。
正常运行 最大额定值
在这些条件下,所有电源都将按此顺序为系统供电。
电源模块输入(4.1V 至 5.7V)[指从电源模块输入 Pixhawk 的电压]
伺服轨输入(4.1V 至 5.7V)
USB 电源输入(4.1V 至 5.7V)
绝对最大额定值
在这种情况下,系统将不消耗任何电能(将无法运行),但仍将保持完好。
电源模块输入(0V 至 20V)[指从电源模块输入 Pixhawk 的电压]
伺服轨输入(0V 至 20V)
USB 电源输入(0V 至 6V)