手动飞行稳定调整说明¶
俯仰轴和滚动轴¶
设置 ATC_RAT_xxx_FF 和 ATC_ACCEL_x_MAX 所需的俯仰和横滚响应参数¶
在俯仰轴和滚动轴上 ATC_RAT_xxx_FF 设置增益的目的是使飞机的实际速率与所需速率相匹配。为此,日志中的 RATE 信息需要比较俯仰的 RATE.PDes 和 RATE.P 日志数据以及滚转的 RATE.RDes 和 RATE.R 日志数据。
随着 ATC_RAT_xxx_FF 将增益设置为 0.15,在稳定飞行模式下起飞并建立悬停,然后在俯仰和滚转方面进行一些急剧的摇杆输入。着陆并从 microSD 卡中提取日志,然后在日志查看软件中查看信号。如果实际速率大于预期速率,那么您需要降低 ATC_RAT_xxx_FF.如果少于,则增加 ATC_RAT_xxx_FF.
(有待补充......直接根据日志数据进行 FF 计算)
如果预期速率和实际速率有一定程度的偏差,则说明在设置中没有正确调平斜盘。在这种情况下,只需确保预期速率和实际速率的变化幅度相似即可。如果您的速率相匹配,但感觉速度太快,那么请减小 ATC_ACCEL_x_MAX 参数,并重复上述过程以匹配期望速率和实际速率。
如果在调整 ATC_RAT_xxx_FF 如果飞机开始摆动,请减小发动机转速。
ATC_ANG_xxx_P 直到振荡停止。不过,对于大多数旋翼飞行器来说,上述建议值应该不会造成这个问题。
调整 ATC_RAT_xxx_D 和 ATC_RAT_xxx_P 收获¶
一旦您的旋翼飞行器与 ATC_RAT_xxx_FF 现在调整 PID 增益。速率 PID 控制器可提供稳定性以抵御干扰,并使实际飞机遵循软件要求的速率。
从 ATC_RAT_xxx_D 增益。使用 基于发射机的飞行稳定调整 ArduCopter 的功能。更改以下参数:
21 |
|
0 |
|
0.030* |
对于 futaba 无线电设备,这相当于旋钮增量为 0.001
调节飞行稳定调整旋钮,直到 ATC_RAT_RLL_D 和 ATC_RAT_PIT_D 增益为 0.001。升空悬停,并在滚转时进行一些急剧的摇杆输入。大多数旋翼飞行器在看到俯仰振荡之前都会看到滚转振荡。这就是建议进行滚转输入的原因。如果没有晃动,将增益增加 0.001 再试一次。在出现快速晃动的值时,将该值减半,并将其作为最终调整值输入。 ATC_RAT_RLL_D 和 ATC_RAT_PIT_D.试着让旋翼飞行器悬停,在俯仰和滚动中快速移动摇杆,以确保其稳定。
现在调整 ATC_RAT_xxx_P 增益。更改以下飞行稳定调整参数:
4 |
|
0 |
|
0.3* |
对于 futaba 无线电设备,这相当于旋钮增量 0.01
调节飞行稳定调整旋钮,直到 ATC_RAT_RLL_P 和 ATC_RAT_PIT_P 增益为 0.05。升空悬停,然后左右剧烈翻滚。如果没有晃动,则将增益增加 0.01,然后再试一次。当增益值达到急剧晃动时,将该值减半,并将其作为最终调整值输入。 ATC_RAT_RLL_P 和 ATC_RAT_PIT_P.试着让旋翼飞行器悬停,在俯仰和滚动中快速移动摇杆,以确保其稳定。
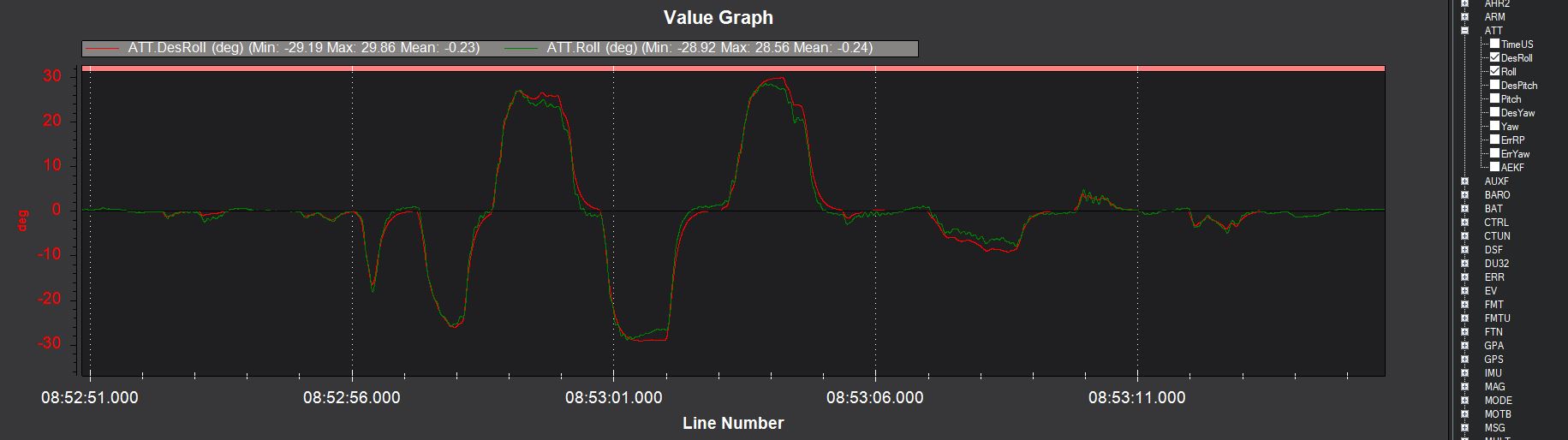
调整后 ATC_RAT_xxx_D 和 ATC_RAT_xxx_P 获得收益后,飞机应该会感觉更加平稳。还可以通过查看 ATT.DesP vs ATT.P 和 ATT.DesR vs ATT.R 日志图来检查飞行稳定调整质量:
设置 ATC_RAT_RLL_I 和 ATC_RAT_PIT_I¶
建议设置 ATC_RAT_PIT_I 增益等于 ATC_RAT_PIT_FF 增益和 ATC_RAT_RLL_I 增益等于 ATC_RAT_RLL_FF 收益。
偏航轴¶
设置 ATC_RAT_YAW_FF¶
在大多数情况下,偏航轴所需的前馈可能非常小,甚至为零。要检查所需的前馈,请将旋翼飞行器悬停并进行 90 度恒定速率转弯。调出日志数据并查看 RATE.Yout 信号。确定偏航率(RATE.Y 信号)恒定期间的平均 RATE.Yout 值。用平均 RATE.Yout 除以平均 RATE.Y(单位:rad/s),即可确定前馈增益。
飞行稳定调整 ATC_RAT_YAW_D 和 ATC_RAT_YAW_P¶
启动旋翼飞行器,在稳定飞行模式下悬停在距离地面不超过 0.25 米的位置,测试起始尾翼设置。如果尾翼看起来 "松散",不想固定,则增加尾翼设置。 ATC_RAT_YAW_P.如果尾巴慢慢地前后摆动,则表示 ATC_RAT_YAW_P 可能太高。如果尾部快速左右摇晃,则应减小尾翼的高度。 ATC_ANG_YAW_P.
在任何情况下,都不建议调整 ATC_ANG_YAW_P 低于 3.5 或 ATC_RAT_YAW_P 高于 0.38。如果您的旋翼飞行器无法在上述范围内实现稳固的尾翼,则尾翼可能存在机械故障--可能是连杆中存在过多的 "斜度 "或间隙,也可能是连杆绑定或伺服器问题。在进行滚转和俯仰调整之前,请先纠正问题。
可以通过检查 ATT.DesYaw 与 ATT.Yaw 的日志来检查调整质量,如下图所示,这是一个不完美但可飞行的调整:
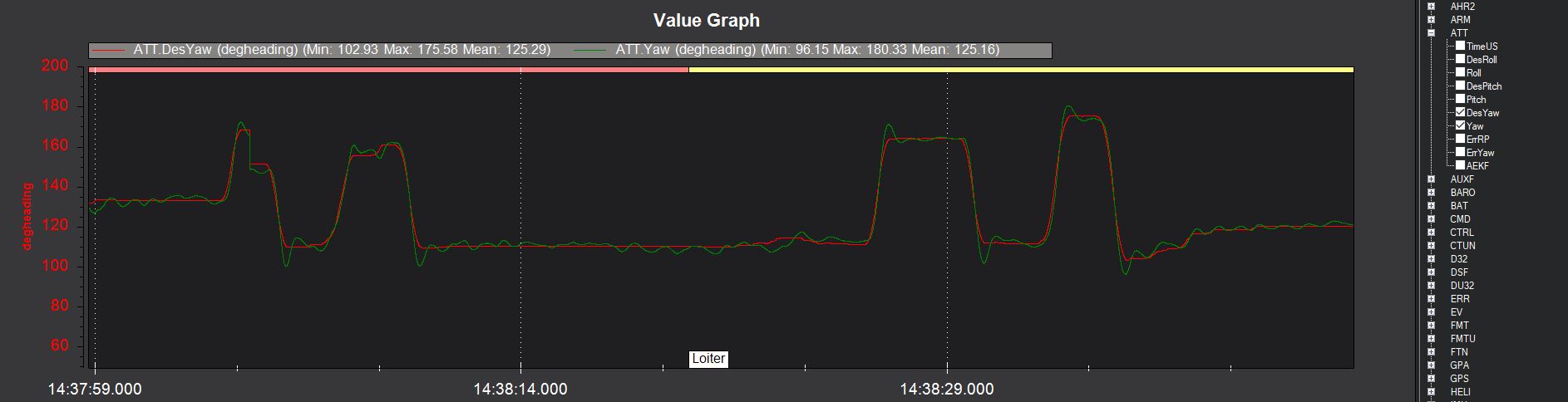
请注意,有一点过冲和中性振铃,表明 FF 或 P 增益有点高或 D 不足,可以稍作改进。
调整配备飞控杆的云台¶
安装了飞控杆云台的旋翼飞行器不需要 H_FLYBAR_MODE 设置为飞杆模式。该参数仅影响 ACRO 飞行模式。除非有理由需要在 ACRO 模式下通过飞杆设置提供直通,否则建议 H_FLYBAR_MODE 的默认值为无飞边。如果您选择使用飞控模式,那么 FF 增益的设置如下所述。否则,FF 的调整将与无飞边云台一样。
备注
对于飞杆头来说,飞杆是速率 PID 循环的机械版本。因此,仅使用 FF 对俯仰和横滚进行调整。飞杆的速率 D 和 P 增益设置为零。I增益、IMAX和ILMI的调整与FBL相同。
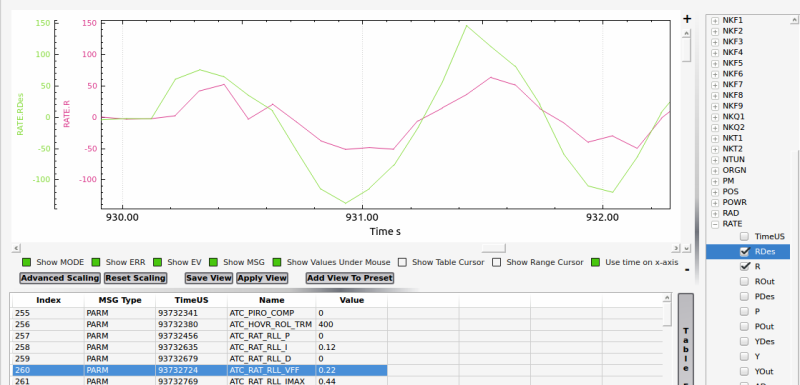
对于连杆率通常较低的飞控头,建议从 0.22 FF 开始调整俯仰和滚转,您可能需要提高 FF。但对于无副翼云台来说,FF 不应超过 0.22,除非您的舵机速度非常非常慢或联动率很低。对于所有旋翼飞行器,FF 增益都能补偿舵机和连杆速度的差异。
下面是在飞杆旋翼飞行器上开始飞行稳定调整的曲线图,起始设置为 ATC_RAT_RLL_FF = 0.22.从图中可以看出,飞机对姿态控制仪的速率要求响应较低,这意味着必须增加 FF 值才能获得适当的速率响应。