基于发射机的飞行稳定调整¶
您可以使用遥控发射机在飞行中进行大量参数调整。这适用于无法使用自动调整功能或希望对每个参数进行全手动调整控制的高级用户。
概述¶
基于发射机的调整允许您在飞行时调整单个参数或一组参数。其基本思想是将参数的调整值与发射机上的旋钮或滑块相连,然后在飞行中通过移动旋钮来调整参数。
通过发射机飞行稳定调整功能,您可以在飞行中使用发射机的第 6 频道飞行稳定调整单个或多个参数。
"这款" 飞行稳定调整 参数决定调整哪个参数。
"这款" TUNE_MAX 参数决定了当通道处于"...... "状态时的最大值。 RC6_MAX而 TUNE_MIN 参数决定当 RC 通道 6 处于 RC6_MIN.
飞行稳定调整 价值观¶
价值 |
意义 |
参数 |
|---|---|---|
0 |
无 |
|
1 |
Stab Roll/Pitch kP |
|
4 |
速率 滚/距 千帕 |
|
5 |
滚动/俯仰速率 kI |
|
21 |
滚动/俯仰速率 kD |
|
3 |
Stab Yaw kP |
|
6 |
偏航率 kP |
|
26 |
偏航速率 kD |
|
56 |
速率偏航滤波器 |
|
55 |
电机偏航净空 |
|
14 |
AltHold kP |
|
7 |
节流率 kP |
|
34 |
节流加速度 kP |
|
35 |
节流加速度 kI |
|
36 |
节流加速度 kD |
|
12 |
装载位置 千帕 |
|
22 |
速度 XY kP |
|
28 |
速度 XY kI |
|
10 |
WP 速度 |
|
25 |
Acro RollPitch kP |
|
40 |
Acro Yaw kP |
|
45 |
遥控感觉 |
|
13 |
旋翼飞行器扩展陀螺仪 |
|
38 |
倾角 |
|
39 |
圈速 |
|
46 |
速率 千帕 |
|
47 |
速率螺距 kI |
|
48 |
速率间距 kD |
|
49 |
速率 滚筒 kP |
|
50 |
速率卷 kI |
|
51 |
率卷 kD |
|
52 |
变速节拍 FF |
|
53 |
费率滚动 FF |
|
54 |
速率 偏航/航向 FF |
|
57 |
卷扬机 |
|
58 |
系统识别码幅度 |
|
59 |
|
** 仅限传统旋翼飞行器
这些数值可以手动设置,也可以使用Mission Planner地面站设置
使用Mission Planner地面站进行设置¶
下面的示例程序将使用 "滚转速率 P "和 "俯仰速率 P"。
将(飞行)控制器连接到Mission Planner地面站
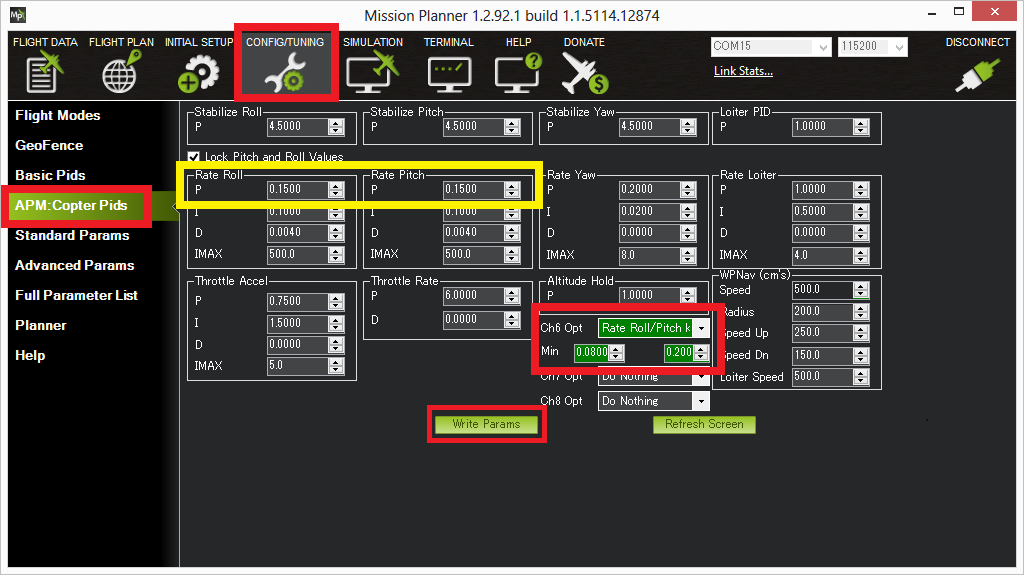
在Mission Planner地面站中,选择 CONFIG>>扩展调整
将 TUNE(飞行稳定调整)下拉框选项设置为 "Rate Roll/Pitch kP"(滚动/音高千帕速率)。
将最小值设为 0.08,最大值设为 0.20(大多数旋翼飞行器的理想增益都在此范围内,但少数旋翼飞行器的最大值可能高达 0.25)
按下 "写参数 "按钮
将发射机的 CH6 飞行稳定调整旋钮转到最小位置,按下 "刷新参数 "按钮,确保 "滚转速率 P "和 "俯仰速率 P "值变为 0.08(或非常接近的值)。
将 CH6 旋钮转到最大位置,按 "刷新参数 "并确保速率卷轴 P 转到 0.20
将 CH6 旋钮移回中间位置
在 "稳定 "模式下上膛和飞行您的旋翼飞行器,调节 ch6 旋钮,直到旋翼飞行器反应灵敏但不摇摆为止。
飞行结束后,断开锂电池连接,并将(飞行)控制器重新连接至Mission Planner地面站
将 CH6 旋钮置于性能最佳的位置,返回 Copter Pids 屏幕并按下 "刷新参数 "按钮
在 "Rate Roll P "和 "Rate Pitch P "字段中重新键入您看到的值,但稍作修改,以便Mission Planner地面站识别已更改并重新发送给(飞行)控制器(注意:如果重新键入的数字与 "Rate Roll P "中显示的数字完全相同,则不会更新)。例如,如果速率卷 P 显示为 "0.1213",则将其改为 "0.1200"。
将 Ch6 选项设回 "无",并按下 "写入参数 "按钮
按右上角的断开按钮,然后按连接按钮。
确保速率卷 P 值是您在步骤 #12 中重新输入的值
备注
当您移动飞行稳定调整旋钮时,数值每秒更新 3 次。在上述步骤 #6 和 #7 中需要按下Mission Planner地面站中的 "刷新 "按钮,只是因为 Copter 没有实时向Mission Planner地面站发送更新。