模拟空速传感器¶
备注
模拟空速传感器越来越难获得,因为数字传感器现在同样便宜,而且更精确、更稳定。强烈建议使用数字式空速传感器,而不是模拟式传感器。
这种空速传感器的工作原理是,顶部的管子是 "主动 "的(测量来自前端开放的皮托管的气压,空气通过空速进入皮托管),底部的管子是 "静态 "的(测量来自侧面有进气口的管子的环境气压)。
用硅胶管将传感器的有源端口连接到从皮托管后部伸出的直管上。斜管是静态部分,连接到传感器的静态端口(传感器上最靠近印刷电路板的端口)。
设置 ARSPD_TYPE 至 1。
PX4/Pixhawk 模拟空速引脚和接线¶
PX4
PX4 上有用于空速的硬件 PIN 11。
空速 "引脚 11 位于 PX4IO 板上的 3 针 DF13 连接器上,但直接连接到 PX4FMU 上的 ADC。
该引脚可承受高达 6.6V 的电压(有一个内部分压器)。
FMU-Pres (气压)3 针连接器位于 PX4IO 电路板的末端,与电源连接器相对。
将空速传感器的信号线连接至 FMU-PRES 连接器的针脚 2(中心针脚)。
将引脚 1(朝电路板中心)连接至传感器 VCC(5 伏)输入端。
将引脚 3(最靠近电路板边缘)连接至空速传感器地线。
在 Mission Planner - Configuration - Advanced Params - Adv Parameter List 中为空速传感器指定适当的 "PIN"。
设置 ARSPD_PIN 在高级参数列表中将参数设置为 11,然后选择 "写入参数"。
对于 Pixhawk
空速 "引脚 15 位于 Pixhawk 电路板上的 3 针 DF13 连接器上。
该引脚可承受高达 6.6V 的电压(有一个内部分压器)。
气压连接器(标有 ADC 6.6V)是 Pixhawk 右上方的一个 3 针连接器。
将空速传感器的信号线连接到连接器的针脚 2(中心针脚)。
将引脚 1(朝电路板中心)连接到传感器的 VCC(5 伏)输入端。
将引脚 3(最靠近电路板边缘)连接到空速传感器的地线上。
在 Mission Planner - Configuration - Advanced Params - Adv Parameter List 中为空速传感器指定适当的 "PIN"。
用于其他(飞行)控制器:
许多设备都有一个模拟 RSSI 输入引脚,可用作模拟空速传感器输入。
备注
大多数模拟传感器输出的信号为 0 至 5V,但大多数 RSSI 输入的最大电压为 3.3V。如果您的速度永远不会超过传感器最大速度输出的 60%(5V 时通常为 200mph),那么您的速度就不会超过这个额定值。但是,如果您可能或只是想绝对安全,您可以在信号上使用 2:1 电阻分压器,然后再将其应用到(飞行)控制器 RSSI 输入引脚。
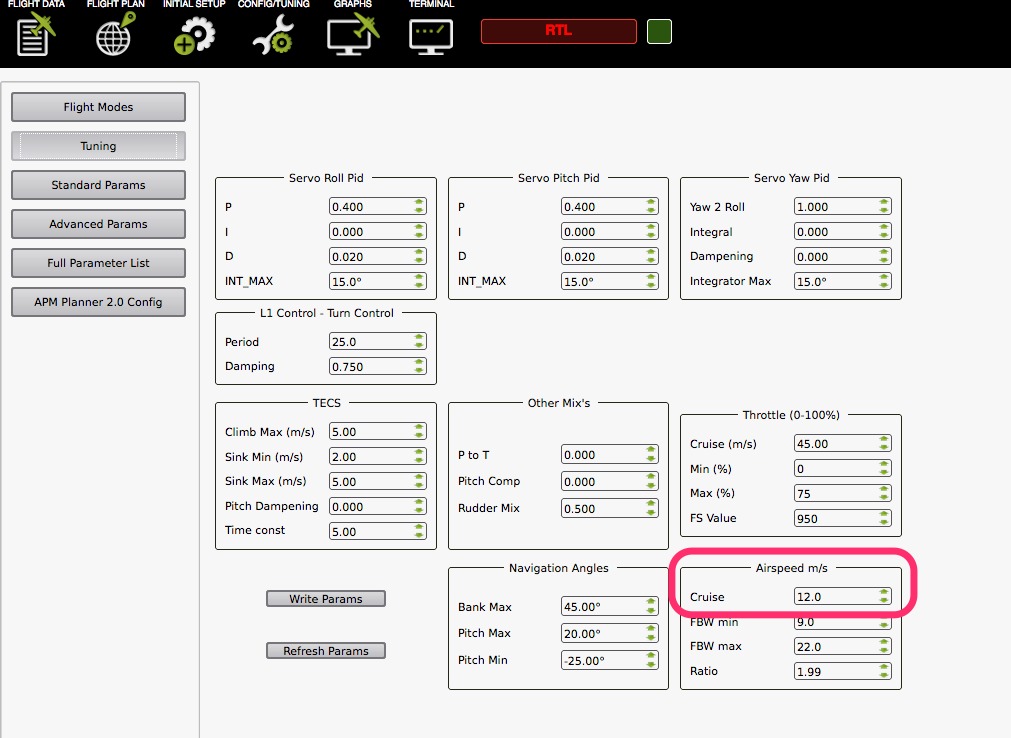
连接空速传感器后,就可以用它来控制自动模式下的飞机速度。在 APM Planner(如图所示)或 Mission Planner 的 "调整 "屏幕中更改 "巡航 "设置:
为空速传感器使用不同的针脚¶
要将空速传感器分配到特定针脚,请通过 USB 将(飞行)控制器连接到电脑。启动Mission Planner地面站并选择 连接 按钮。
选择 配置 标签,然后 高级参数 然后 高级参数列表.向下滚动列表至 ARSPD_PIN 参数,并选择要使用的引脚。
对于 APM2 模拟引脚,将其设置为 0...9。
在 APM1 上设置为 64,用于电路板末端的专用空速端口。
在 PX4 上将模拟空速端口设置为 11。
在 PX4 上设置为 65,用于 I2C 空速传感器。
设置为其他电路板中列出的 RSSI 引脚 文献资料通常是 0 针。
- 选择引脚后,选择 "更新参数 "选项卡,然后
关闭 Mission Planner地面站.
有关设置空速传感器引脚的更多信息,请访问 在这里找到.