模拟空速传感器进行台架测试¶
本文介绍了如何在(飞行)控制器上使用电位计来模拟空速传感器的输入。这对地面测试非常有用。
概述¶
如果您的空气动力表面(如自动襟翼、副翼、升降舵等)与空速有关或由空速驱动,那么在飞机上通过向(飞行)控制器发送特定空速对其进行地面测试可能会有所帮助。
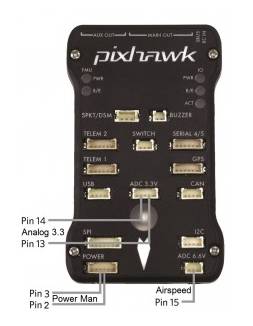
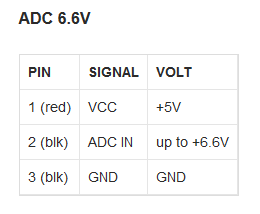
为此,您必须向模拟输入引脚施加电压,该引脚被指定为模拟空速输入引脚。在 Pixhawk 上,您可以将电位计插入 ADC 6.6v(针脚 15)或 ADC 3.3v(针脚 11)。如果您使用的是 I2C 气种子 传感器,将(飞行)控制器临时配置为使用模拟端口。
所需部件¶
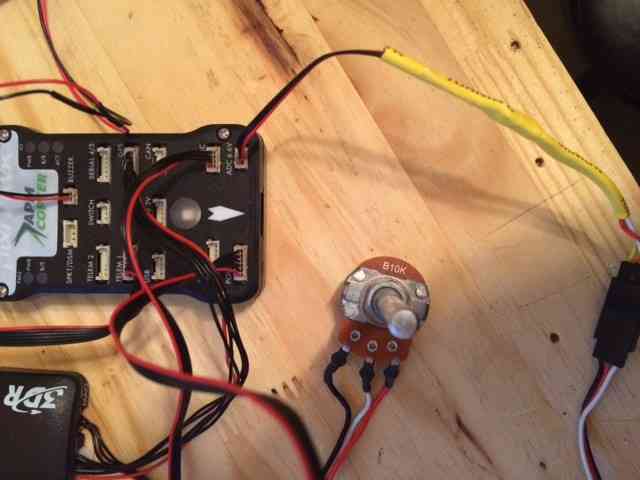
您需要一条 DF-13 电缆和一个简单的 这样的电位器 或 此.B10K 和 B5K 电位器均可用于设置 0 至 90 米/秒的速度。
Pixhawk 配置和设置¶
将 DF 13 电缆连接到电位计后,将其插入电位计。
ADC 6.6v 端口.打开您选择的地面控制站 (GCS),然后更改
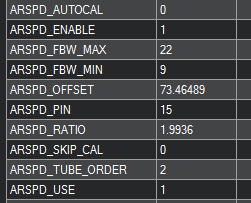
ARSPD_PIN 参数到针脚"15" 如下图所示。
重新启动 Pixhawk,使参数更改生效。重启和初始化完成后,空速将重置为 1-3 m/s。调整控制面板,设置所需的速度。
备注
如果您使用的是 I2C 空速传感器--...... 记得重新启用!
设置 ARSPD_PIN
将参数设置为 65,并循环(飞行)控制器电源以确保 I2C 航速正确初始化。检查空速显示屏上是否有正常的 1-3 m/s 噪音。