调整平面的地面转向¶
如果飞机上有尾轮或机头轮,飞机固件就能控制地面转向。除手动模式外,地面转向在所有模式下均可激活,如果调整得当,可使飞机在起飞和着陆时更容易沿着跑道保持直线飞行。
地面转向可以通过使用与 RUDDER 输出 (SERVOx_FUNCTION =21),可以通过机械方式或第二个伺服器,或者通过专用的接地转向输出 (SERVOx_FUNCTION =26).如果分配了 "地面转向"(GroundSteering)输出,则该输出独立于 "轻便转向器"(RUDDER)输出运行。 地面转向高度.
在为飞机设置地面转向时,您需要正确设置 4 个关键参数。本指南提供了一套正确设置这些参数的步骤,以便飞机在地面上准确跟踪跑道。
控制转向¶
要启用地面转向,需要设置 地面转向高度 参数为零以上。这是在初始高度之上的气压高度,在该高度上,转向装置从地面方向盘转向变为用于气动控制的方向舵转向。建议将其设置为 5 米,以允许气压漂移。
当地面转向处于激活状态时,只要没有方向舵或副翼输入,它就会锁定罗盘航向。因此,在滑行过程中要在地面操纵飞机,应使用方向舵改变方向,然后将手从方向舵和副翼上移开,以保持当前的罗盘航向。只有启用了指南针,地面转向才能正常工作。
关键参数¶
STEER2SRV_P:这将告诉代码飞机的转弯半径(以米为直径)。正确使用该参数至关重要,因为它将告诉代码选择什么样的转向角才能达到所需的转弯率。
STEER2SRV_I:这是转向角积分的增益。增大该增益可使控制器修正因载具失调而产生的稳定偏移。
STEER2SRV_D:用于调节转向控制环路的阻尼。该增益有助于减少振动时的转向抖动。增益值应以 0.01 为增量,因为过高的增益值会导致高频转向振荡,从而对载具造成过大压力。
STEER2SRV_IMAX:这限制了积分器运行的转向度数(以厘度为单位)。默认设置为 1500 厘度时,积分器的伺服行程限制为 +- 15 度。伺服器的最大偏转为 +- 45 厘度,因此默认值为总控制行程的 1/3,除非载具严重失调,否则该值是足够的。
steer2srv_minspd:这是用于转向的最小假定地面速度(米/秒)。设定最低速度可以防止载具刚开始行驶时产生振荡。载具的行驶速度仍可低于此限值,但转向计算将根据此最低速度进行。
steer2srv_tconst:该值控制从要求到实现转向角的时间常数(以秒为单位)。默认值为 0.75,几乎适用于所有漫游车。飞机的地面转向需要更小的时间常数,建议使用 0.5 的值,以获得固定翼飞机的最佳地面操纵性能。0.75 表示控制器将尝试在 0.75 秒内纠正预期转向角和实际转向角之间的任何偏差。高级用户可能希望缩短该时间,以获得更快的响应,但没有必要设置一个小于飞行器所能达到的时间。
地面转向高度:使用地面转向控制器控制方向舵的高度。如果不为零,则将使用 STEER2SRV 控制器来控制相对于原点高度低于此限制的高度的方向舵。
步骤 1:设置初始参数¶
要启动调整程序,请设置以下值:
STEER2SRV_P见步骤 2
STEER2SRV_I: = 0.1
STEER2SRV_D: = 0.02
STEER2SRV_IMAX: = 1500
steer2srv_minspd: = 1
steer2srv_tconst: = 0.5
地面转向高度: = 5
这些都是保守的数值,对大多数飞机来说都是合理的。
步骤 2:设置 STEER2SRV_P¶
要设置您的 STEER2SRV_P 参数 您需要测量飞机的转弯直径。
关闭发动机后,将飞机调至手动模式,并将方向舵向一侧猛打。然后慢慢推动飞机转一圈。用卷尺测量该圆的直径,然后设置 STEER2SRV_P 以米为单位。大多数飞机的转弯直径约为 4 米。如果您的转弯直径与 4 米相差甚远,那么您的方向舵速率或抛射量可能设置错误。
解决织布问题¶
地面转向系统的一个常见问题是转向系统 "摇摆",左右转动而不是平稳转动。出现这种情况可能有几个原因。
首先需要确定的是,问题仅限于低速行驶还是也会影响高速行驶。如果问题只发生在低速行驶时,那么最有可能的问题是 steer2srv_minspd 太低。默认值为 1.0 m/s,这是相当低的,如果您的 GPS 航向在低速时不是很可靠,那么您可能需要提高这个数值。试试 2.0,看看对低速穿梭是否有帮助。
在转向控制器中,有 3 个关键参数可以控制编织:
较小的 STEER2SRV_P 将减少编织,尝试每次减少 0.1
更大的 STEER2SRV_D 可以 "阻尼 "编织,但如果数值过大,就会产生高速振荡。例如,您可能会发现 0.1 的值会减小阻尼,但 0.2 的值可能会导致转向伺服器高速振荡。如果出现快速振荡,则减小 STEER2SRV_D 值减少 50%。
更大的 steer2srv_tconst 将减慢转向控制器的速度,从而减少摆动。尝试以 0.1 为单位逐步提高。
在当前的控制器系统中,您确实需要对这些值进行一些试验,以获得您想要的效果。
自动起飞调试¶
要调整地面转向以实现自动起飞,通常最好在 FBWA 模式下进行调整,只有当您可以在 FBWA 模式下起飞而完全不覆盖转向(即起飞时不使用舵杆)时,才可更改为自动起飞。
使用 FBWA 起飞电梯 选项可以设置与 FBWA 模式下自动起飞时相同的自动升降行为。这有助于使尾翼飞机的尾轮着地(也可用于使三旋翼飞机的前轮着地)。
限制转向以防止机翼翻滚¶
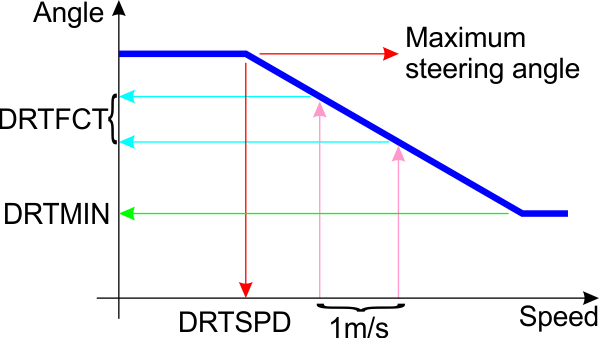
在大型快速飞机上,尤其是翼展较大的飞机,如果转向过猛,就有可能在机翼上滚动。为了解决这个问题,可以设置转向限制,使转向角度随速度增加而减小。当速度低于设定的降额速度时,不会出现限制,转向角度不会发生变化。当速度增加时,转向角开始以设定的速率减小,直至达到最小转向角。
DRTSPD - 在此速度之后,转向角会减小
DRTFCT - 速度每增加 1 米/秒减少的度数
DTRMIN - 不再减小的最小转向角
转向角与速度的关系如下图所示: