调整巡航配置¶
匀高度水平飞行操作概述¶
在 FBWB、CRUISE、AUTO、GUIDED、CIRCLE、LOITER、RTL 等自动油门模式下,会出现 "无需操作 "的恒定高度保持巡航。参见 飞行模式 查看自动油门模式的完整列表。
在 FBWB 和 CRUISE 模式下,如果没有空速传感器,(飞行)控制器会将目标节流阀设定为 TRIM_THROTTLE 油门处于中杆位置,调整螺距以保持高度。推力变化所产生的结果就是空速。抬起油门杆将增加油门,从而提高空速。
使用空速传感器时,(飞行)控制器将使用节流阀位置将目标空速设定为以下两者之间的线性插值 最大风速 和 最小风量.俯仰角将调整为恒定高度飞行。
在自动油门控制模式下、 空速巡航 如果使用的是空速传感器,则目标空速为 TRIM_THROTTLE 如果不使用传感器,将为平均节流值设置。在 "自动 "和 "引导 "模式下,节流阀的 涡流 选项允许飞行员在飞行过程中根据需要在这些模式下通过油门调整这些值。
警告
虽然 TRIM_THROTTLE 在直接使用空速传感器时不使用该值,但必须将其设置为工作值,因为在空速传感器发生故障时将使用该值。
AHRS 水平姿态¶
期间 加速度计校准在 "水平 "姿态下,机翼和机身完全保持水平。飞机可以在不同的速度范围内保持恒定的高度飞行,这取决于油门水平和攻角(AOA)。
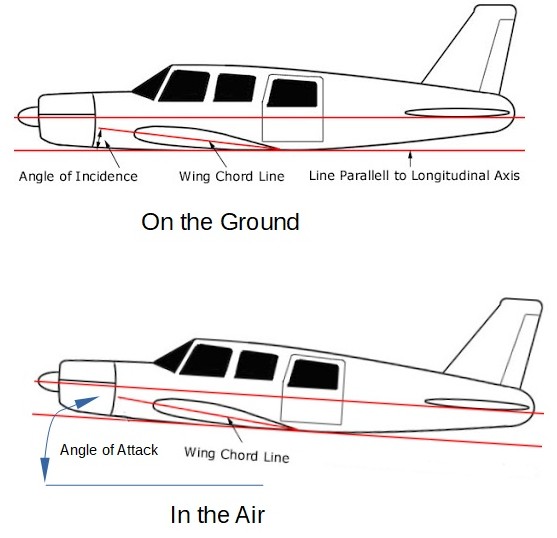
AOA 通常为几度,但根据巡航速度/油门的不同而变化。这就是 "微调水平 "螺距。上图对此进行了解释,这就是所谓的 "修整水平 "状态。虽然许多飞机都内置了一定的入射角(即机翼帘线与机身帘线成正角),但有些飞机没有,有些飞机需要稍高的AOA才能以理想的巡航速度飞行。
如果校准的水平步骤是在飞机机身线水平的情况下完成的,初始飞行将是安全的,但在非高度控制模式下,飞机可能无法以所需的飞行速度保持高度(即需要过大的油门才能保持高度和/或巡航速度可能快于或慢于所需的速度)。
调整 FBWB 或 CRUISE 模式空速¶
(飞行)控制器在自动油门模式下的目标是获得升降舵和油门的正确组合,以保持恒定的飞行高度。(飞行)控制器如何做到这一点,详见 TECS(全能量控制系统)速度和高度调整指南.
启用空速传感器时¶
在 FBWB 或 CRUISE 模式下,目标空速可通过油门杆位置直接控制。中油门会将速度设定为 最大风速 (高杆)和 最小风量 (低杆)。
备注
"这款" TRIM_THROTTLE 参数应调整为巡航速度下使用的平均节流阀值。它可以优化速度控制回路的偏置点,并在空速失效时使用。
巡航时,OSD 或 GCS 中的人工地平线可能会在水平指示器(即机身/(飞行)控制器水平)上方显示平均正或负俯仰。这意味着 "调整水平 "俯仰或 AOA 与加速度计校准步骤中的设置不同。可以对其进行修整,使非高度控制模式以相同的速度和油门飞行。具体做法是调整螺距微调,使用以下工具增加所需的机头上升或下降度数 PTCH_TRIM_DEG.这也优化了速度控制回路的偏置点,并允许非高度控制模式以相同的油门和速度进行水平飞行。
使用 PTCH_TRIM_DEG 调整巡航姿态时,也会在 GCS 或 OSD 上增加人工地平线偏移,但如果需要,可以使用 飞行选项 如果需要平飞时(飞行)控制器的姿态,而不是平飞时的人工地平线,则需要位掩码第 8 和/或 9 位。
无空速传感器¶
在没有空速传感器的情况下,螺距微调和 TRIM_THROTTLE 需要根据所需的中杆巡航速度适当更改参数。
提示
通常情况下,飞机需要调整 2 或 3 度俯仰角才能以最佳巡航速度/油门飞行,而不是以机身/(飞行)控制器水平俯仰角飞行,尤其是小型轻型飞机或滑翔机。这可以在设置时通过以下方式实现:
(首选) 将所需度数的机头向上(通常)或向下添加到 PTCH_TRIM_DEG.
在加速度计校准的第一步,即 "水平 "步骤中,将载具定位在车头向上或向下几度的位置,以便与巡航姿态相匹配。
将载具定位在车头向上几度的位置,并使用
校准 级别按钮。这将调整 AHRS_TRIM 参数。AHRS_TRIM 参数最多只能改变(飞行)控制器平面与 "水平 "之间 10 度的差异。如果需要更大的改变(例如(飞行)控制器的安装位置略微偏下),则可以使用 PTCH_TRIM_DEG 来手动更改 AOA。
提示
在 FBWB 或 CRUISE 模式下以巡航速度飞行时,您可以检查日志中的 ATT.Pitch,以确定在这些模式下所需的平均螺距调整。适当调整 PTCH_TRIM_DEG 在这些模式下进行水平飞行时,将其降至零。
备注
当使用 PTCH_TRIM_DEG 调整微调,这将反映在 ATT.Pitch 日志信息中,同时也会反映在 OSD 和 GCS 水平线显示中(即水平线间距 = =)。 PTCH_TRIM_DEG +校准水平螺距),这样即使飞机的螺距与(飞行)控制器的校准螺距不同,在 "微调 "飞行时显示屏也会保持水平。