差速扰流板 & 全屋翼¶
使用方法¶
飞翼¶
普通飞翼飞机使用两个控制面作为升降舵来控制俯仰和滚转。在某些情况下,小翼上还会添加方向舵来控制偏航。差分扰流板利用了将升降舵分成 4 个独立控制面的优势:正常的升降舵功能用于俯仰和滚转控制,而偏航控制则是利用机翼一侧的两个控制面产生阻力,从而控制偏航运动,模拟方向舵控制。如果校准正确,它将确保飞行员在起飞和着陆时通过方向舵输入进行平稳的偏航控制,并允许飞行员在转弯时进行滑移/打滑补偿(类似于差动副翼)。
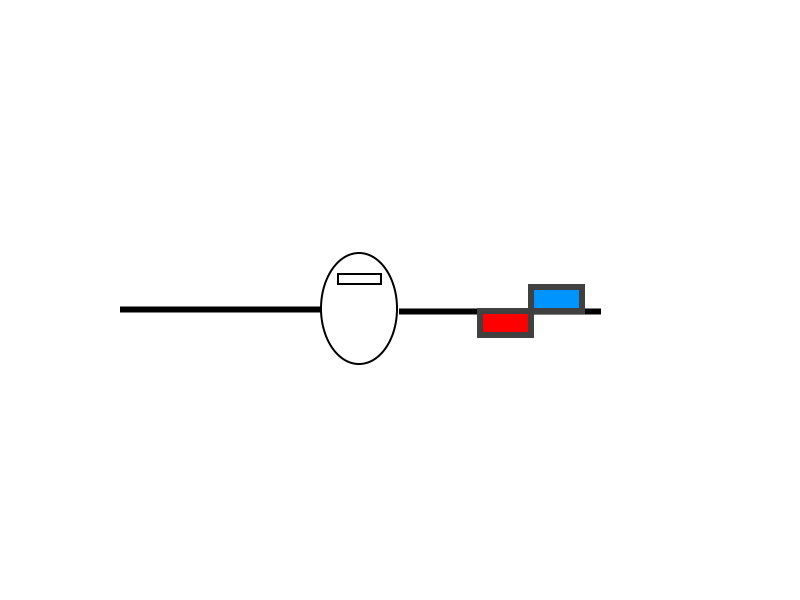
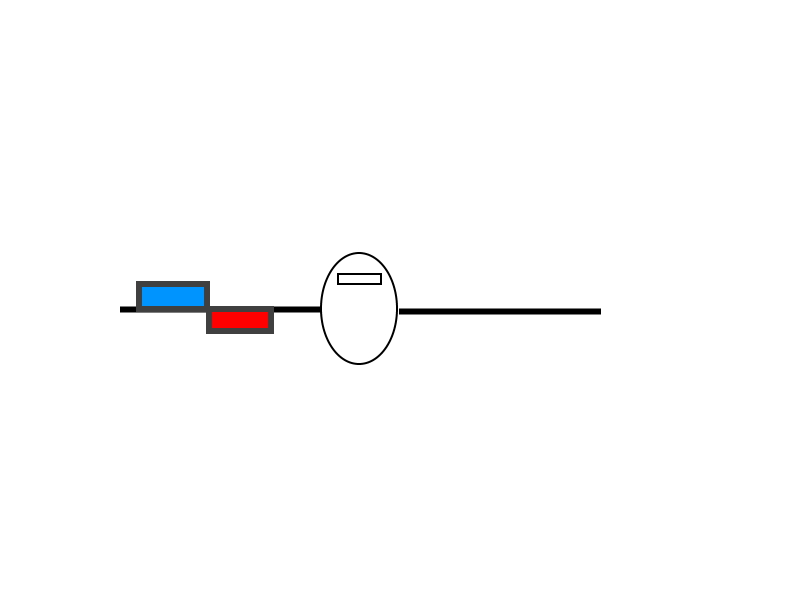
通过在左翼产生阻力来实现左偏航: |
通过在右翼产生阻力来实现右偏航: |
|
|
输入差分扰流板的舵量由以下参数控制 dspoilr_rud_rate.如果值为 0,则完全禁用此功能。默认值为 100(%)。常规飞机和滑翔机可能需要更改该值。
滑翔机¶
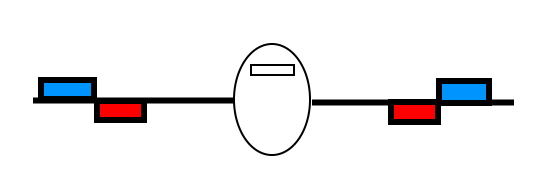
滑翔机可以利用差动扰流板来实现飞翼式功能,但可以选择 乌 制动器。"乌鸦 "操作如下图所示,机翼一侧的内扰流板和外扰流板向相反方向移动,以实现 "乌鸦 "制动,但作为副翼板一起移动。内扰流板可比外扰流板延伸得更远,以提供襟翼效果。这样就可以通过机翼两侧的两个控制面实现副翼、襟翼和乌鸦动作。
准备工作¶
要使用差分扰流板功能,机身必须有 4 个控制面(每个机翼 2 个)。
设置¶
现在使用 SERVOn_FUNCTION 参数设置 4 个通道:
功能名称 |
功能编号 |
说明 |
差速器扰流板左 1 |
16 |
应将其设置为左外侧伺服器 |
差速器扰流板右侧 1 |
17 |
应将其设置为右外侧伺服器 |
差速器扰流板左侧 2 |
86 |
应将其设置为左内伺服器 |
差速器扰流板右侧 2 |
87 |
应将其设置为右内侧伺服器 |
您可以使用 SERVOn_REVERSED 参数调整每个舵机的方向,并交换通道以获得正确的升降舵和方向舵运动方向。还可以进行襟翼操作。襟翼输入对内外控制面运动的权重可通过以下方式设置 dspoiler_crow_w1 和 dspoiler_crow_w2 分别为 "0 "和 "0"。每个参数的默认值 "0 "表示没有翻板动作。
备注
手动襟翼控制由任何 RC 通道控制,其 RCx_OPTION 设置为 "208"。
差速器扰流板选项¶
DSPOILER_OPTS 参数提供了几个选项,可用于根据飞机的具体情况调整 dspoiler 功能。它们可用于在滑翔机上设置 "全屋 "机翼。 DSPOILER_OPTS 是一个位掩码,每个位可实现不同的功能。
位 |
说明 |
0 |
俯仰控制,该位启用或禁用使用差分扰流板的俯仰控制输出。1 使用升降舵作为飞翼的信号源,0 使用副翼作为传统飞机的信号源 |
1 |
全幅副翼,1 使用内外控制面进行滚转控制 0 仅使用外控制面 |
2 |
渐进式襟翼,0 表示襟翼制动--内控制面下移,外控制面同时上移 1,0 至 50%襟翼时,只有内控制面下移,50% 至 100%襟翼时,外控制面上移,这表示先传统襟翼后襟翼制动 |
默认情况下,第 0 位和第 1 位均设置为 1。 常规飞机和滑翔机可能需要将第 0 位改为 "0"。
dspoiler_ailmtch 允许将内表面的向下行程限制为其全部向下行程的百分比。这只会影响控制面用作全幅副翼或差动偏航时的行程。使用该参数后,具有较大向下行程的襟翼控制面仍可用作全幅副翼。控制面的向上行程不受影响。
乌鸦模式开关¶
如果使用差分扰流板,则设置 RCx_OPTION 将通道调至 "87",可以控制 CROW 副翼(外扰流板)的运行。
高位:不改变 CROW 变形量或使用渐进式 CROW。
中间位置:强制渐进乌鸦,假设 dspoiler_crow_w1 为非零,即使 DSPOILER_OPTS 第 2 位为零。
低位置:有效设置 dspoiler_crow_w1 为零。只有内扰流板随襟翼通道移动,即正常襟翼。
这样就可以在进场时实时更改 CROW 操作,从而在进场过程中更改速度制动和下降率。