使用Mission Planner地面站配置遥测无线电设备¶
本文介绍如何使用 Mission Planner地面站.
提示
许多用户不需要配置无线电!但当您与他人共同使用载具时,您可能需要配置无线电信道(Net ID)。
概述¶
Mission Planner地面站 支持使用简单的图形用户界面配置无线电设备。
进行更改:
使用微型 USB 电缆将其中一个无线电设备连接到电脑。
插入载具电池,为连接在载具上的无线电供电。
打开Mission Planner地面站,转到 初始设置 | 可选硬件 | SiK 无线电设备 page.
选择正确的 COM 端口,并将波特率设置为 57600。确保 "连接 "按钮处于断开状态,如下图所示。
按下 加载设置 按钮和 当地 和 远程 区域应填写包括固件版本在内的值
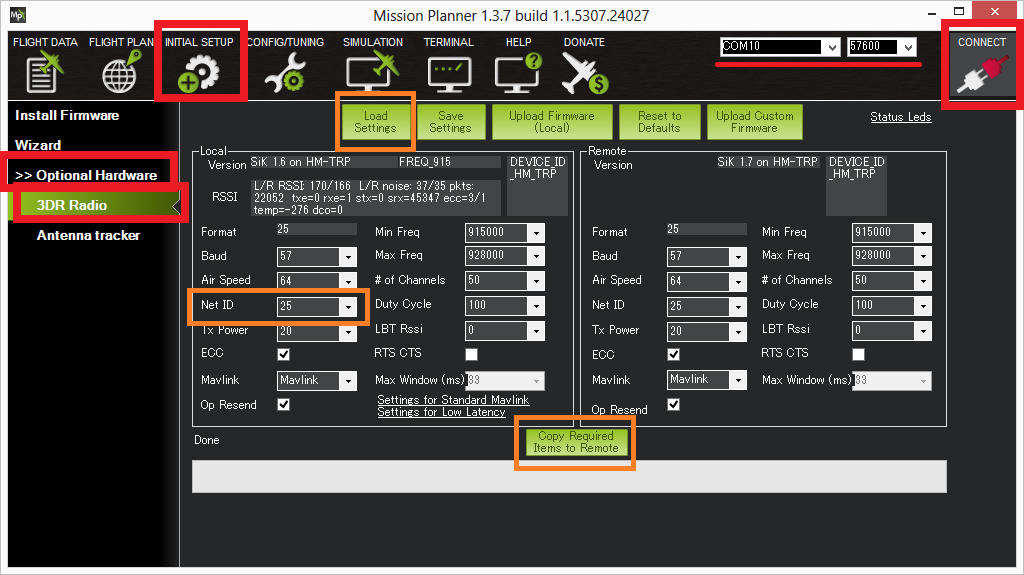
最常更改的条目是
净值 身份证.大多数无线电的默认值为 25,但如果您计划与其他可能使用相同无线电的飞行员在一个区域内飞行,最好将其改为其他数字。更改后,单击 将所需项目复制到远程 并按下 保存设置
您可以选择更新的其他参数:
波特 (默认值 57):Mission Planner地面站或飞行器与本地无线电通信的速率。"57"=每秒 57600 比特。
空气速度 (默认为 64):两个无线电对讲机之间的通信速率。"64"=64kbps(千比特/秒)。设置较低的速率会增加无线电的通话距离,但会降低链路上的数据传输速率(即在给定时间内可发送的数据量)。
ECC (默认为 "on"):控制纠错是打开还是关闭。开启时使用 "12/24 戈莱纠错码",即在发送数据的同时发送一个 16 位的 CRC 字节,以确保坏数据被丢弃。遗憾的是,这也会使整个链路的数据传输速率减半,但我们建议开启 ECC,尤其是当载具远离基地时,因为传输误差会随着距离的增加而大大增加。
MAVlink (默认为 "MAVLink"):控制传输是否针对 MAVLink 数据包进行优化。如果使用操纵杆或安卓平板电脑的虚拟操纵杆手动驾驶飞行器,请设置为 "低延迟"。请注意,只有将该参数设置为默认的 "MAVLink "时,才会发送无线电信号强度(rssi)和错误率信息。
发射功率 (默认值 20):传输功率,其中 1=1.3 毫瓦,2=1.5 毫瓦,5=3.2 毫瓦,8=6.3 毫瓦,11=12.5 毫瓦,14=25 毫瓦,17=50 毫瓦,20=100 毫瓦。应根据当地规定进行设置。一些各国信息 在此链接.
工作周期 (默认为 100):无线电发送数据包的最大时间百分比。如果占空比低于给定阈值,世界上有些地区允许更高的发射功率或更多的频率。例如,在欧洲,如果占空比低于 10%,就可以在 433 频段的更多频率上进行传输。遥测流量相当 "突发",因此平均发射时间一般不会很长。如果将占空比设置在 100%以下,可用带宽就会减少,因此只有在较高的空速下才能很好地进行遥测。通过将占空比设置为零,可以将无线电设置为只接收。
最大窗口 (默认为 33):确保 GCS 在 33 毫秒内向飞行器发送一个数据包。当 "MAVLink "设置为 "低延迟 "时,该值应保持在较低水平(如 33)。
LBT Rssi (默认为 0):保持 "先听后说 "的阈值,使其符合某些国家的法规要求。当非 0 时,无线电在发射前会侦听一段没有收到其他无线电信号的安静时间。该参数设置了接收机信号强度,低于该强度的电波将被视为 "安静"。如果该参数设置为零,则禁用 LBT。将其设置为 25(最小值)时,信号强度为-121 dBm。阈值在 25 以上每增加 0.5dB,例如 40 相当于 7.5dB 的信号强度。完整公式如下
signal_dBm = (RSSI / 1.9) - 127
根据欧洲 9.2.2.2 规则,无线电中的 LBT 实施使用最少 5ms 的监听时间,外加随机监听时间。请注意,在许多地区,您需要结合 AFA(自适应频率灵活性)实施 LBT。只要具备以下条件,无线电就能实现 AFA
NUM_CHANNELS设置为 1 以上。RTS CTS 硬件流量控制。如果您使用的是 2016 年年中之后发布的 ArduPilot 固件版本,并且已将无线电连接到 Pixhawk Telem1 Telem2 或其他支持 RTS/CTS 的遥测端口,则可以激活此功能,或将其设置为自动,以提高性能。