Matek M8Q DroneCAN/MSP GPS/MAG/BARO¶
Matek M8Q 基于 ArduPilots 的 AP_Pheriph 固件,是一款 GPS+COMPASS+BAROMETER 外设,带有 CAN/DroneCAN 和 MSP 接口,可与(飞行)控制器连接,另外还有一条 I2C 扩展总线,可用于空速传感器等其他外设。
特点¶
- ArduPilot AP_Periph F303 CAN 节点集成:
GPS SAM-M8Q(GPS、格洛纳斯、伽利略)
磁罗盘 QMC5883L
气压计 DPS310
- CAN 引导加载器 LED,蓝色
快速闪烁,CAN 节点与飞行控制器之间无通信
慢速闪烁,在 CAN 节点和飞行控制器之间进行通信
- GPS PPS LED,绿色
GPS 3D 固定时闪烁(1Hz)
启动按钮
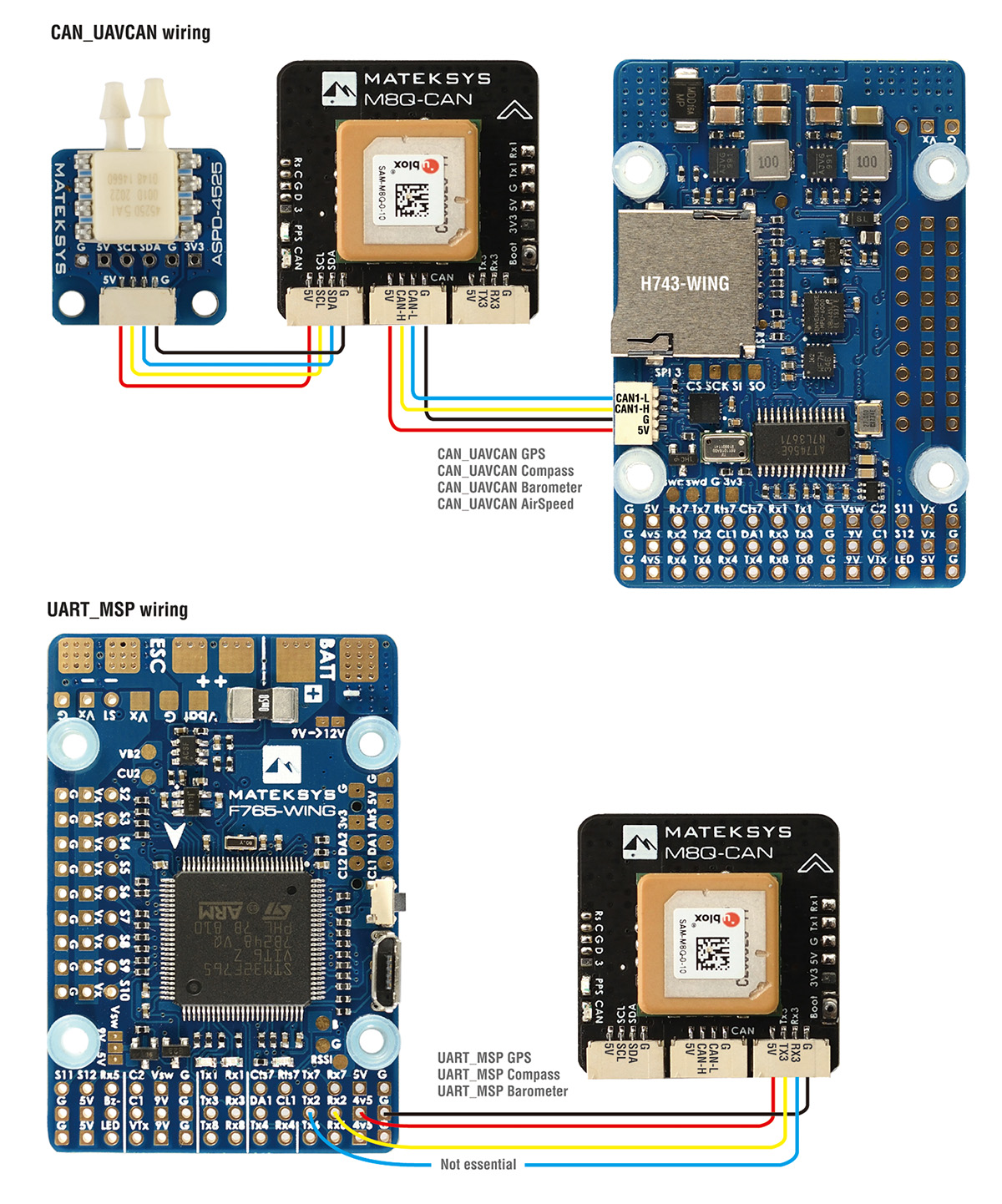
- 接口:
CAN,/DroneCAN 连接到(飞行)控制器
I2C JST-GH 连接器,外部空速传感器
UART 用于通过 MSP 与(飞行)控制器进行备用连接
JST-GH 连接器
- 规格
输入电压范围4~6V
耗电量100mA
工作温度:-20~80 °C
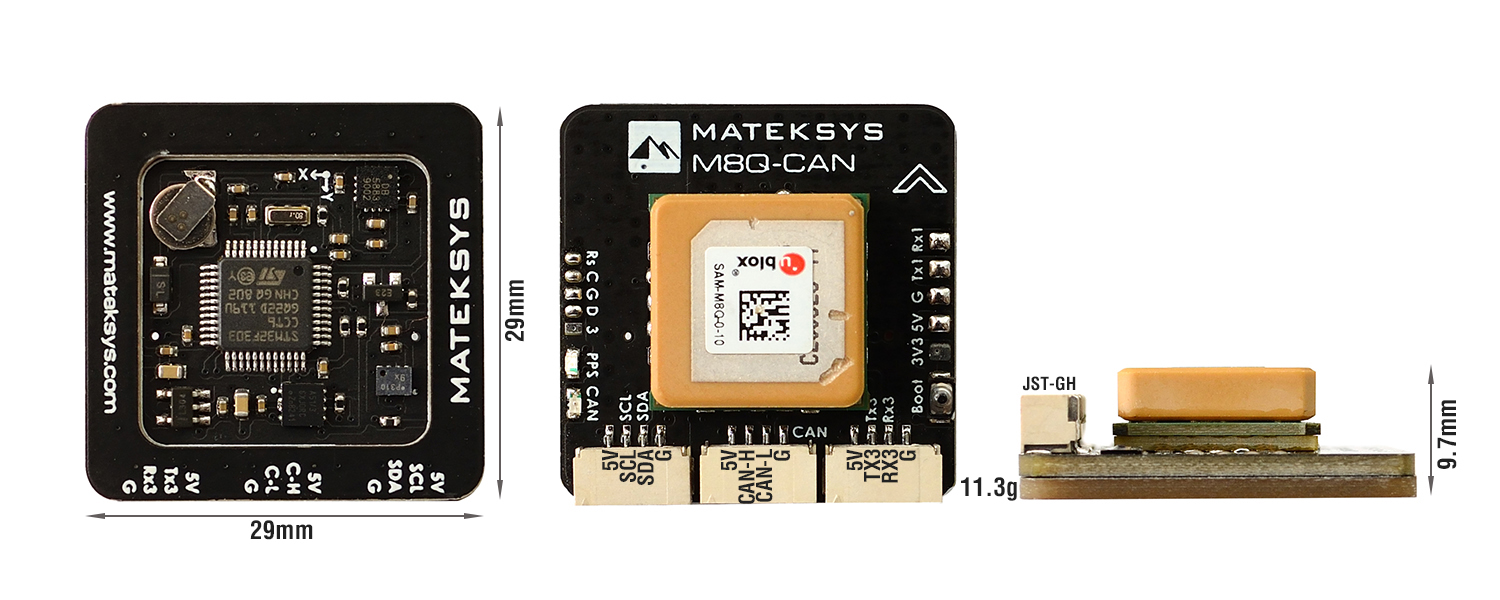
尺寸:29 毫米*29 毫米*9.7 毫米
重量:11.3 克
布线¶
设置¶
DroneCAN¶
can_d1_protocol = 1
CAN_P1_DRIVER = 1
GPS1_TYPE = 9 (DroneCAN)
compass_disblmsk = 0(或确保未选中 DroneCAN 位)
如果空速传感器连接到 I2C 端口、
ARSPD_TYPE = 8 (DroneCAN)
ARSPD_USE = 1
默认空速传感器应为 "DLVR-L10D "类型,如果不是,则必须使用 SL-CAN 界面设置并输入内部固件。在Mission Planner地面站中转到设置 > 可选硬件 > UAVCAN(DroneCAN) > SLCan 模式 CAN1 > 参数
如果使用
MS4525 套 ARSPD_TYPE -> 1、
MS5525 套 ARSPD_TYPE ->5(注意:只能使用地址为 0x77 的 MS5525,以免与 DPS310 气压计冲突。)
SDP3X 套件 ARSPD_TYPE -6
DLVR-L10D 套件 ARSPD_TYPE -9
写,并重新启动
MSP¶
SERIALx_PROTOCOL= 32 (MSP),其中 x 是用于连接(飞行)控制器的 SERIAL 端口GPS1_TYPE = 19 (MSP)
BARO_PROBE_EXT = 4096 (MSP Baro)
BARO_PRIMARY = 1(如果要使用 MSP 气压作为主气压,否则保留为默认值)
compass_disblmsk = 0(或确保 MSP 位未被选中)
MSP 固件更新¶
2020 年 9 月之前,不支持 MSP 连接。不过,您可以按照以下指南更新到新固件 这里.