mRobotics KitCAN CAN/DroneCAN 适配器节点+指南针+巴罗¶
来自 mRo 的新一代集成技术 CAN/DroneCAN 适配器节点此外,KitCAN 还集成了超高精度磁力计和气压计,并提供了将传统 GPS 和空速传感器连接到 DroneCAN 的简便方法,只需使用一条 CAN 总线连接到(飞行)控制器。它还包括一个 RGB LED 和 Arm 开关/按钮。
特点¶
DroneCAN 至 GPS(UART 接口)
DroneCAN 至 I2C 空速传感器(MS5525 默认配置)和/或磁力计(自动检测)
- DroneCAN 集成外设:
RM3100 高精度磁力计
DPS310 气压计
RGB LED
安全开关
JST-GH 连接器
安装孔:14 毫米 x 31.5 毫米,直径 3.3 毫米
引脚¶
GPS 端口
针脚 |
信号名称 |
电压/公差 |
|---|---|---|
1 (红色) |
VCC |
5V |
2 |
TX(数据输出) |
3.3V |
3 |
RX(数据输入) |
3.3V/5V |
4 |
I2C SDA |
3.3V/5V |
5 |
I2C SCL |
3.3V/5V |
6 |
接地 |
- |
CAN 端口
针脚 |
信号名称 |
电压/公差 |
|---|---|---|
1 (红色) |
VCC |
5V |
2 |
CAN_H |
CAN 总线 |
3 |
CAN_L |
CAN 总线 |
4 |
接地 |
- |
I2C 端口
针脚 |
信号名称 |
电压/公差 |
|---|---|---|
1 (红色) |
VCC |
5V |
2 |
I2C SDA |
3.3V/5V |
3 |
I2C SCL |
3.3V/5V |
4 |
接地 |
- |
备注
在交付时,KitCAN 将发现一个 MS5525 空速传感器和/或连接到其 I2C 外部总线的任何受 ArduPilot 支持的标准 I2C 磁力计。
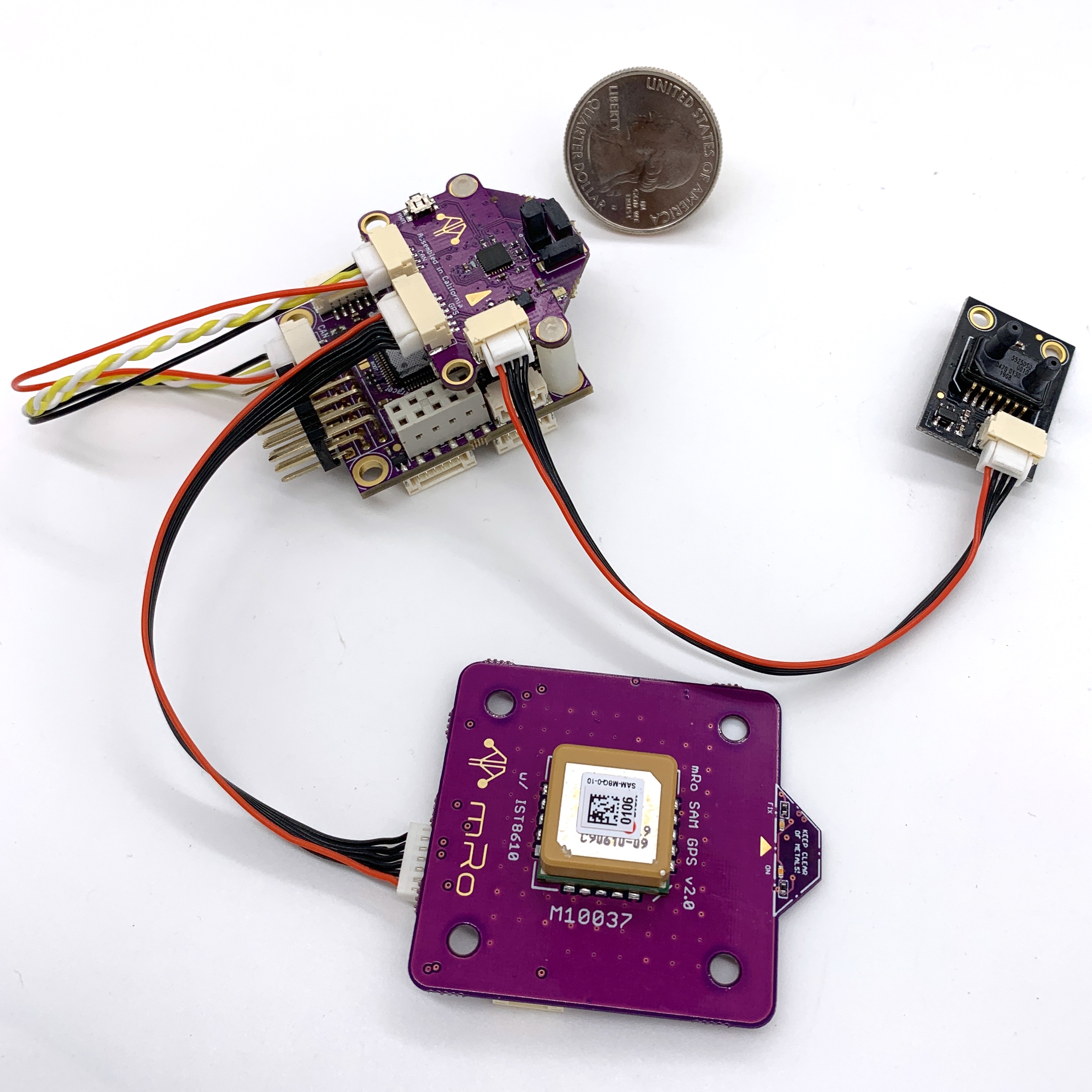
典型系统¶
在这种情况下,Kitcan 连接到一个 mRo Pixracer (飞行)控制器,并为 MS5525 空速传感器和典型的 GPS/Compass 组合提供接口。 mRo SAM GPS + IST8308 Mag
设置¶
通过地面站确认(飞行)控制器上设置了以下参数。
CAN_P1_DRIVER = 1(假设它位于(飞行)控制器的第一 CAN 总线上)
GPS1_TYPE = 9(DroneCAN),或者如果是辅助 GPS,则设置为
GPS2_TYPE = 9 (DroneCAN)
重新启动
确保未禁用 DroneCAN 罗盘驱动程序。(compass_disblmsk 不应设置第 9 位)。
如果控制器上已经连接了多个指南针,您可能需要将所连接的指南针设置为比其他指南针更高的优先级,如果它的精度或性能更好的话。
启用集成的 I2C RGB LED 组:
NTF_LED_TYPES 应在(飞行)控制器中设置第 5 位(DroneCAN)。
如果(飞行)控制器通过以下方式启用了安全开关,则会自动使用集成的安全开关 安全解除 为 "1"(默认值)。(brd_safetyenable 在旧固件版本中)
如果要启用连接的 I2C 空速传感器,请设置:
ARSPD_TYPE = 8 (DroneCAN)
如果连接的传感器不是 I2C 地址为 0x76 的 MS5525 类型,则必须访问 KitCAN 的 CAN 参数以选择连接到适配器的空速类型。使用Mission Planner地面站(或 DroneCAN 图形用户界面),进入菜单 SETUP/Optional Hardware/DroneCAN/SLCan Mode CAN1/Parameters。出现 CAN 适配器参数后,更改以下内容(这是在 DroneCAN 适配器内更改参数,而不是在(飞行)控制器内更改参数,以便适配器使用正确的驱动程序并将信息转换为 DroneCAN 航速格式):
ARSPD_TYPE = 4(默认为 I2C-MS5525 的 0x76 地址,以防止与板载集成的 DSP310(地址为 0x77)发生冲突)。如果使用其他传感器,请更改类型以匹配该传感器。
ARSPD_USE = 1
ARSPD_BUS = 0
然后重新启动。
固件¶
该设备使用的 "f303-M100025 "固件位于 https://firmware.ardupilot.org/AP_Periph.参见 DroneCAN 高级设置的 SLCAN 部分 如果需要更改或更新,请点击此处获取下载说明。