Torqeedo 电机¶

Rover-4.2.0(及更高版本)支持控制单个 Torqeedo 旅行, 超轻型 或 巡航 电机使用其定制的 RS485 协议。
本页部分图片由 torqeedo.com 提供
购买什么¶
Torqeedo 马达可直接从以下网站购买 torqeedo.com 或其 经销商
Japan Drones RS485 转串口转换器电路板 或 DIY 部件包括
N 沟道 MOSFET (仅在使用旋耕机接口时才需要)
3 针或 4 针 螺丝端子
6 针串行电缆
(飞行)控制器连接¶
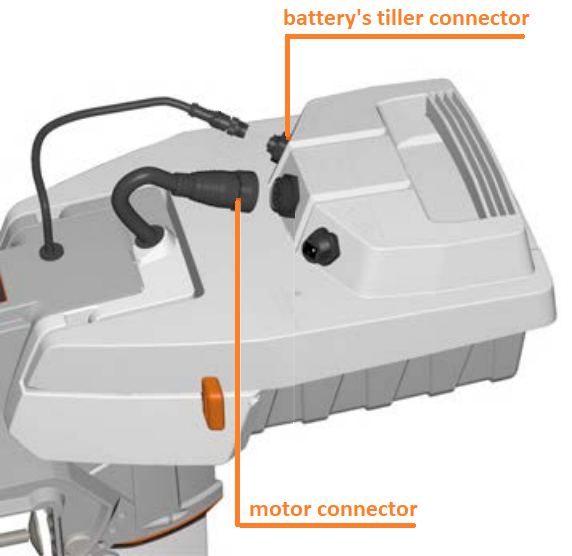
(飞行)控制器可以连接到电池的舵柄连接器或电机连接器上。如果要使用 torqeedo 的内置电池,则应将(飞行)控制器连接到舵柄连接器上。如果使用单独的电池,则应将(飞行)控制器连接到电机连接器上(内置电池可以取下)。
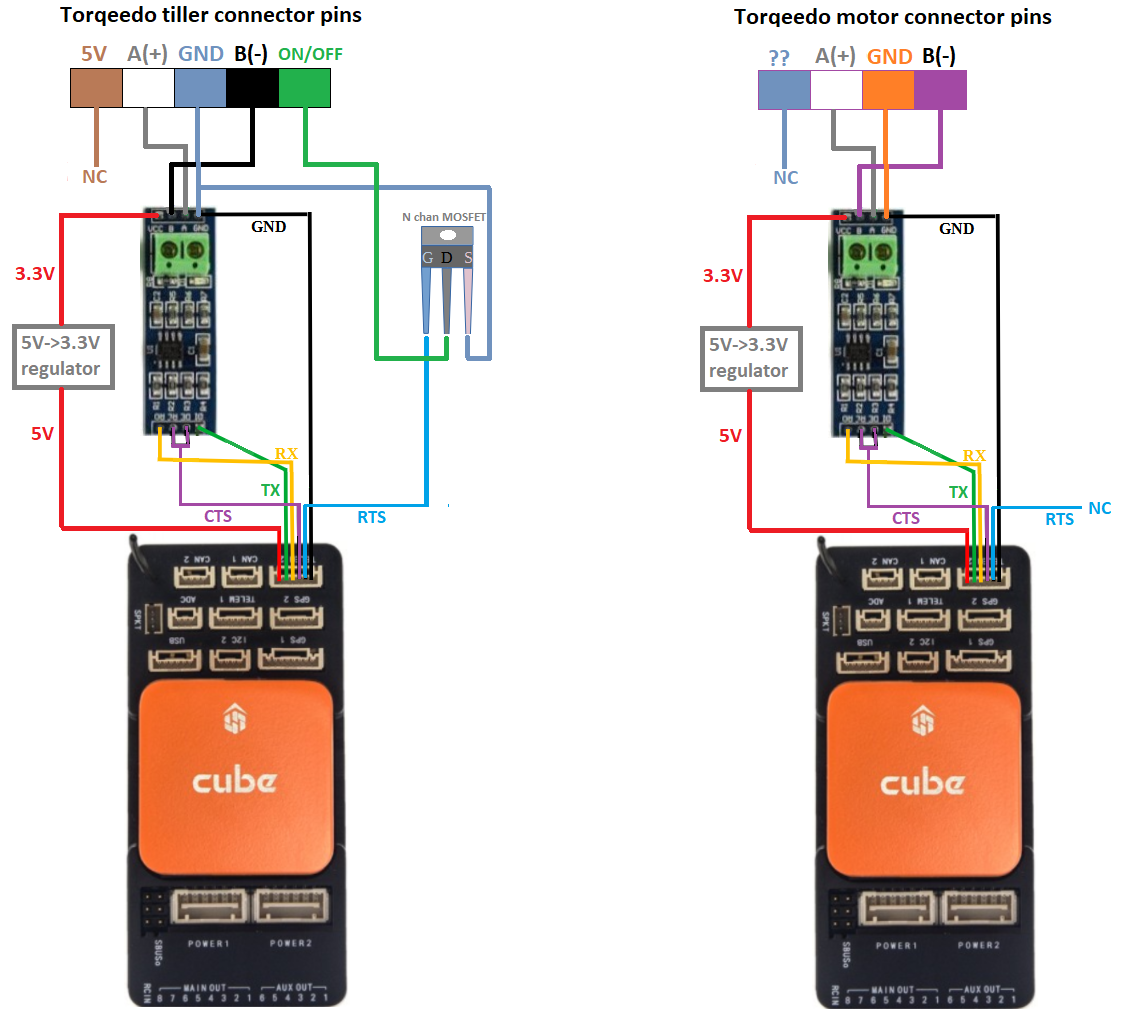
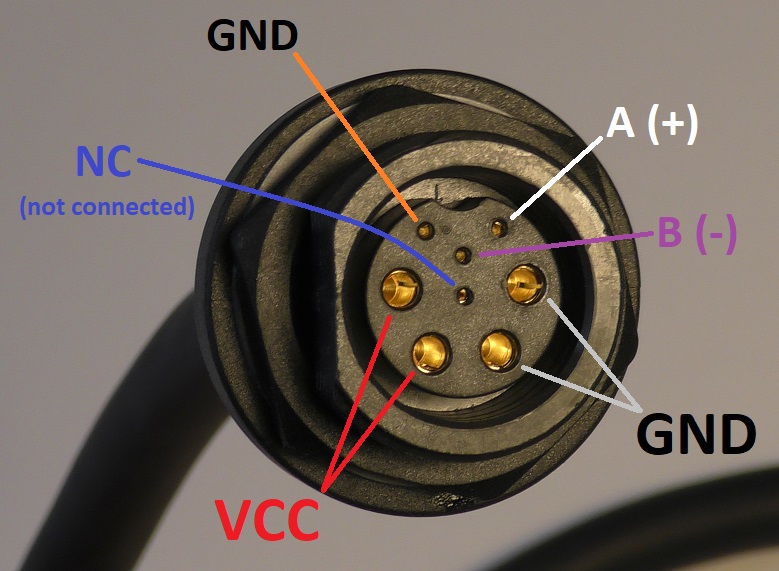
应使用上述部件组装接口板,并按下图进行连接。左边的图片显示的是使用舵柄连接器时的接线,右边的图片显示的是使用电机连接器时的接线
警告
如果电机连接器方法与非转阀式电池一起使用,请务必使用内置短路保护功能的电池。在该接口的早期开发和测试过程中,在对油门施加了较大且快速的变化后,成功地造成了电机内部的短路。短路(尤其是使用大容量电池时)可能导致火灾和严重伤害。
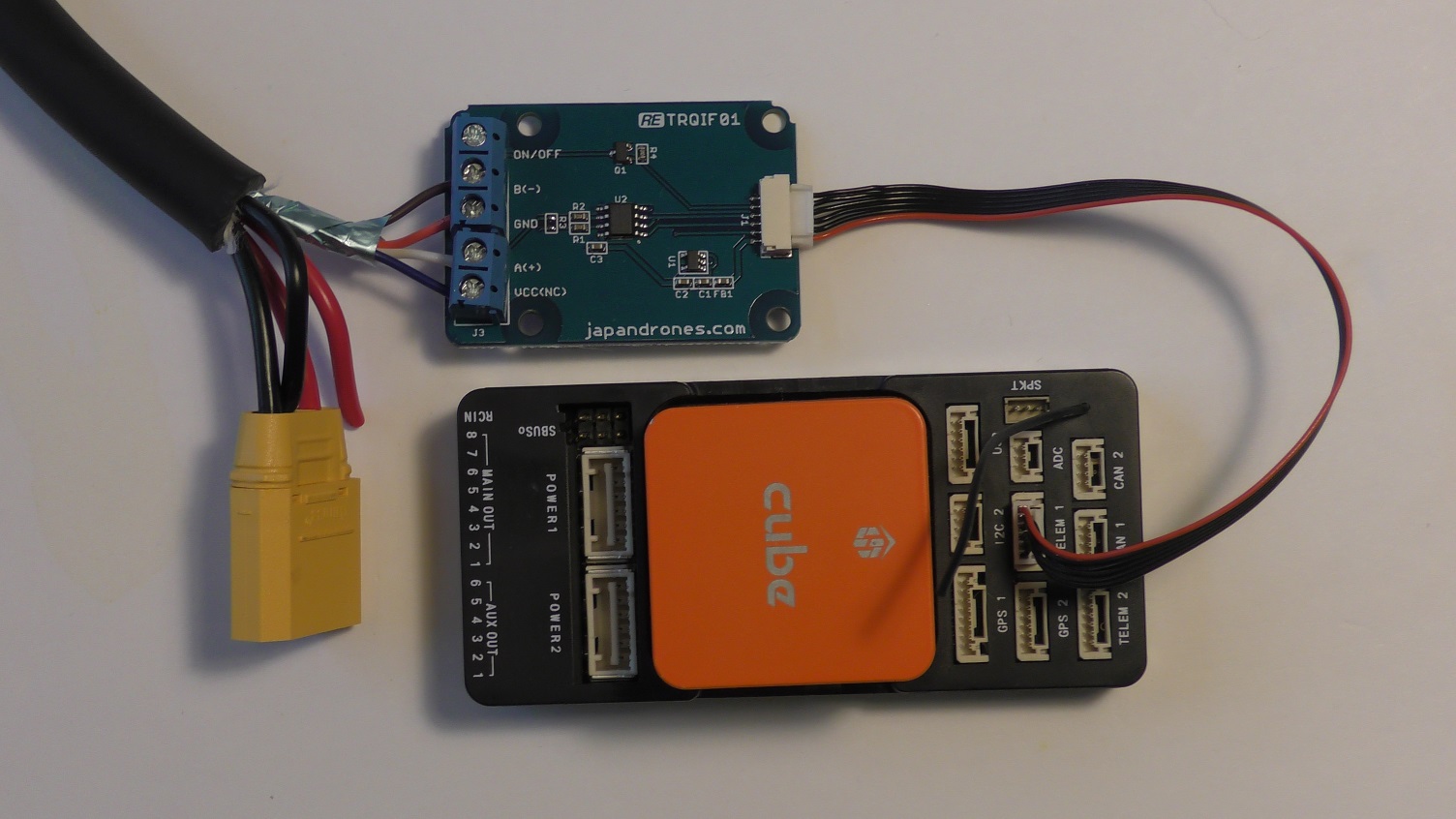
以下是改装后的节气门延长线和 Japan Drones RS485 转串口转换器电路板
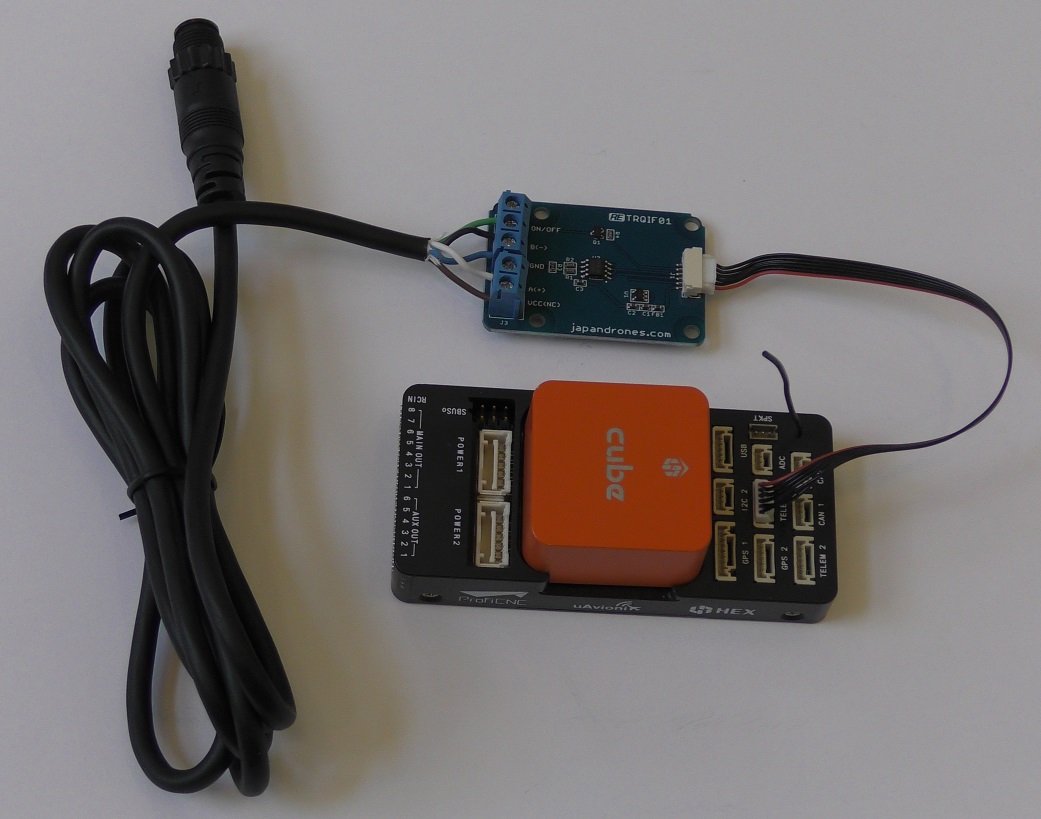
以下是改装后的电机延长线和 Japan Drones RS485 转串口转换器电路板
配置¶
请设置以下参数
TRQD_TYPE如果自动舵将连接到舵柄连接器,则 = 1(舵柄);如果连接到电机连接器,则 = 2(电机)。serial1_protocol = 39(Torqeedo),如果 Torqeedo 连接到串行端口 1。如果使用其他串行端口,请设置相应的 SERIALx_PROTOCOL 参数
SERIAL1_BAUD = 19(19200 bps)(如果使用串行端口 1)。如果使用其他串行端口,请设置相应的 SERIALx_BAUD 参数。
如果使用的串行端口带有流量控制引脚(清除发送和准备发送),则无需进一步设置参数。如果使用不带流量控制的串行端口,则请设置
TRQD_ONOFF_PIN= 54 (AUX5),将(飞行)控制器的 AUX5 引脚连接至接口板的 MOSFETTRQD_DE_PIN= 55 (AUX6),将(飞行)控制器的 AUX6 引脚连接至 RS485<->TTL 转换器的 DE 和 RE 引脚
通过设置该参数,可从 Torqeedo 电池或电机获取电池电压和电流信息。
BATT_MONITOR = 23 (Torqeedo)
记录和报告¶
通过 ESC_TELEMETRY_1_TO_4 mavlink 消息,电机转速和温度以及电池电压和电流会实时报告给地面站。如果使用Mission Planner地面站(或许还有其他地面站),可以在 "数据 "屏幕的 "状态 "选项卡的 "esc3_curr"、"esc3_rpm "等字段中看到这些值。
默认情况下,"TRQD "信息以每秒 10 赫兹的速度写入机载日志,其中包括
健康:(飞行)控制器是否成功控制电机
DesMotSpeed(电机速度):飞行员或(飞行)控制器要求的最新电机速度,用 -1000 到 +1000 之间的数字表示
MotSpeed(电机速度):发送给电机的最新速度请求,数值从 -1000 到 +1000 不等。
SuccCnt:从电机成功消耗的报文数(应稳步上升)
ErrCnt:已损坏或无法处理的字节或报文的数量(这个数字应该相对较小)
TRST "日志信息(仅在使用 "Tiller "连接时可用)包括主控错误代码、电机温度、电压、电流、功率(瓦特)和转速,以及电池充电状态百分比、电压和电流。
TRSE "日志信息(仅在使用 "Tiller "连接时可用)包括电机类型、电池容量和软件版本。
TRMP "日志信息(仅在使用 "电机 "连接时可用)包括电机转速、功率(瓦特)、电压、电流和温度。
通过设置 TRQD_OPTIONS = 3