拖曳马达¶

本文章介绍了如何安装拖曳马达,以便与UGV无人车设备一起使用。
购买什么¶
有刷曳引机,如 Minn Kota Endura C2-30.它可由 12V 锂电池供电,最高速度时耗电约 15 安培。
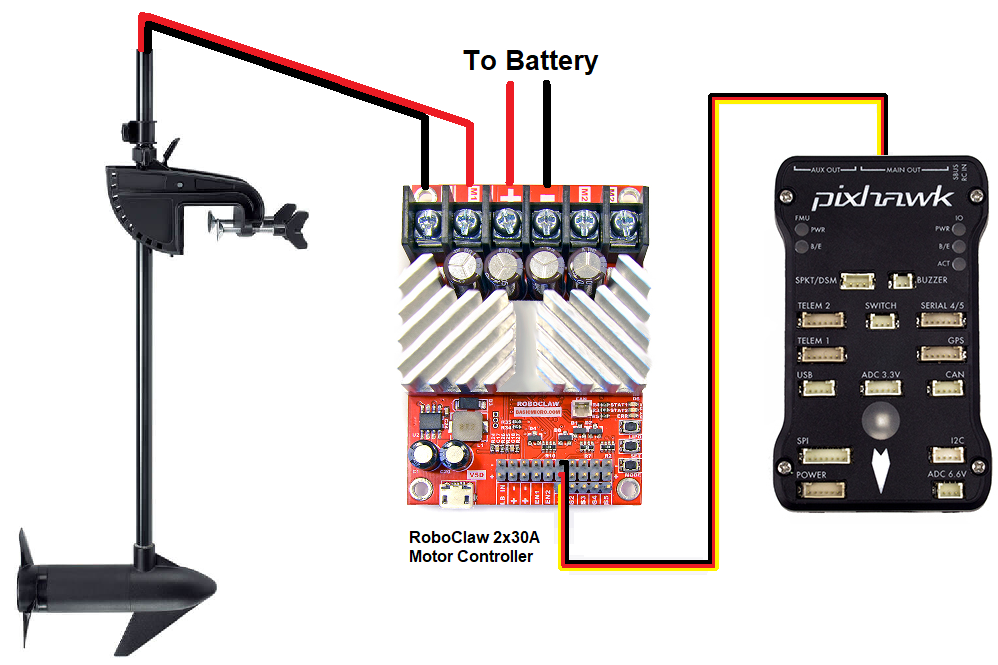
带 PWM 输入的有刷电机控制器,如 Cytron SmartDrive 40 或其中一个 RoboClaw 无刷电机控制器
3S Lipo 电池,额定电压至少为 20C,容量至少为 5000mAh(这应允许全速运行约 15 分钟)。
连接和配置¶
拆下电机的上手柄和控制部分,露出正负极引线
将电机引线连接到有刷电机控制器的 M1 端子上
将电机控制器的遥控输入连接至(飞行)控制器的相应遥控输出(例如,(飞行)控制器的遥控输出为 3)。 独立的转向和油门车)
使用Mission Planner地面站的 "电机测试 "页面测试电机移动方向是否正确(请参阅 "电机测试 "页面)。 电机和伺服配置 维基页面)。如果电机旋转的方向不正确,则将连接电机驱动器和电机的黑线和红线反接,或者更换电机驱动器的电线。 伺服3_反转 参数(假设电机控制器连接到(飞行)控制器的 RC 输出 3)
如果电机不能全速旋转,尝试降低转速。 SERVO3_MIN 和/或增加 SERVO3_MAX (假设电机控制器连接到(飞行)控制器的 RC 输出 3)。
如果电机在应该停止的时候向前或向后缓慢移动,则应调整电机的转速。 SERVO3_TRIM (假设电机控制器连接到(飞行)控制器的 RC 输出 3)。