调整速度和油门¶
本页介绍如何调整漫游车的速度和油门控制器。一般来说,最好先调试该控制器,然后再调试转向控制器。
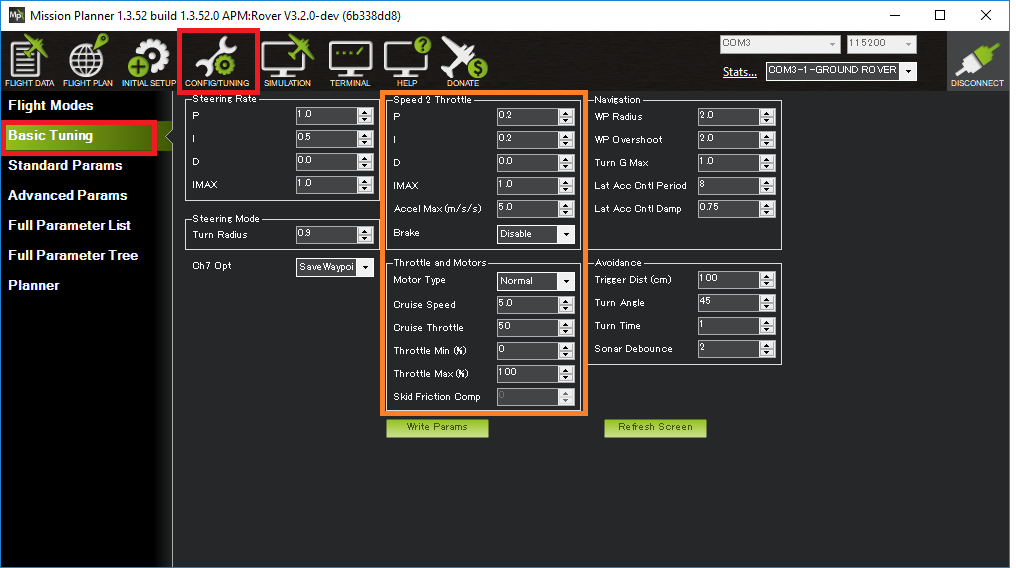
巡航节流阀和巡航速度¶
"这款" 巡航节流 和 CRUISE_SPEED 参数设置了预期速度节流控制器使用的基准节流阀输出。这两个值必须合理且相互一致,这意味着 巡航节流 值(以百分比表示)应接近达到目标所需的节流量。 CRUISE_SPEED (米/秒)。
设置这些参数的最简单方法是
设置 辅助功能开关 到 "学习巡航速度
上膛载具并切换到 手册
以 50% 至 80% 的油门驾驶载具
将辅助功能开关移至高位几秒钟,然后再移回低位
检查地面站是否有类似 "Cruise Learned:Thr:XX Speed:YY "之类的信息,确认 CRUISE_SPEED 和 巡航节流 已更新
预期速度节气门 PID 调节¶
预期速度-油门控制器尝试使用 PID 控制器实现预期速度(由飞行员或(飞行)控制器设定)。所有模式除 保持 和 手册 使用该控制器。
该控制器的 P、I 和 D 增益保存在 ATC_SPEED_P, ATC_SPEED_I 和 ATC_SPEED_D 参数。 ATC_SPEED_FF 应为零。
调整该控制器的建议步骤如下:
使用遥测无线电将地面站与飞行器连接起来
设置 GCS_PID_MASK 调至 2(节流阀/电门)以向地面站发送 PID 信息
在地面站上绘制 "piddesired "和 "pidachieved "值。如果使用Mission Planner地面站,打开 "飞行数据 "屏幕,选中 "调整 "复选框(底部中间),双击图表并选择 "pidachieved"、"piddesired"。
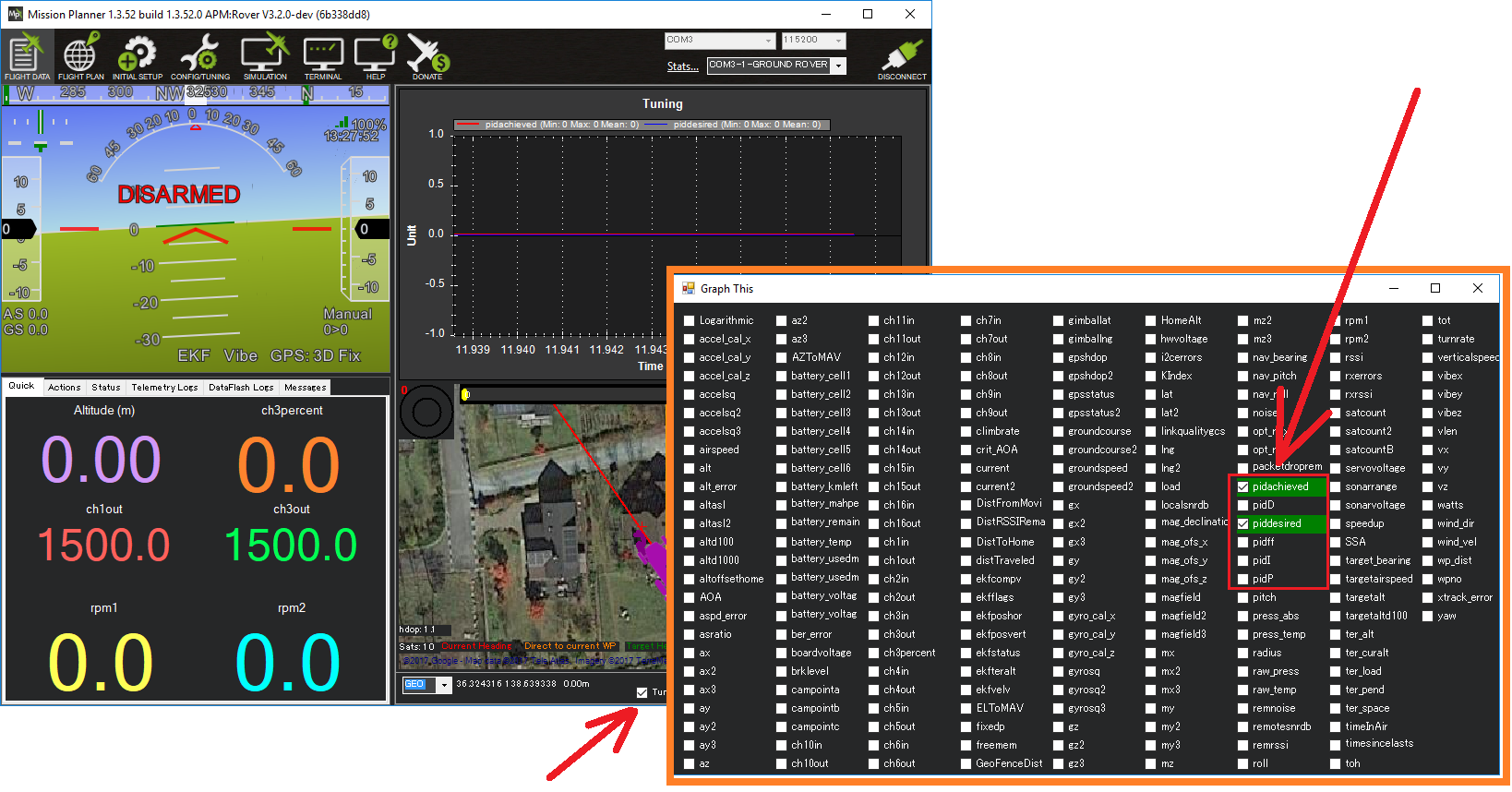
在 Acro 模式下以不同速度驾驶载具,并比较实现目标与预期目标之间的差距。
调整 ATC_SPEED_P, ATC_SPEED_I 上调或下调,使所需服从所获
"这款" P 增益 是最重要的,应首先调整。如果车速生涩、不稳定,则应降低该参数。如果载具提速缓慢,则应增加该参数。
"这款" 我的收获 修正长期误差。如果载具从未达到预期速度,则应增加该参数。如果车速在过快和过慢之间缓慢摆动,则应降低该参数。I 通常应低于 P。
"这款" D 增益 的作用是通过对抗速度的短期变化来稳定输出。可以将其保持为零。
"这款" FF 增益 应为零,因为 巡航节流 和 CRUISE_SPEED 用于计算基本节流阀输出,从而无需前馈。
最大加速度¶
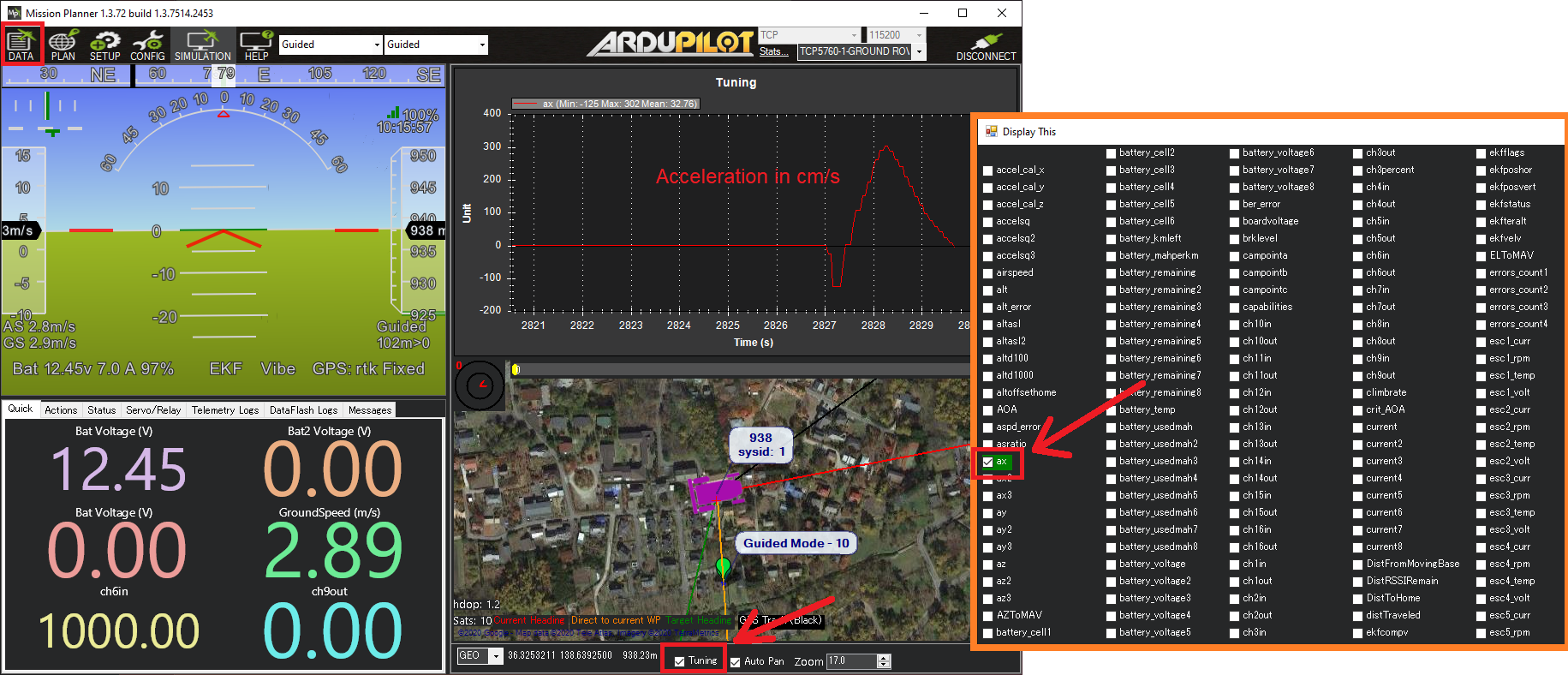
虽然不如其他调整值重要,但 ATC_ACCEL_MAX 和 ATC_DECEL_MAX 参数的设置应符合载具的物理极限。这有助于速度控制器避免尝试不可能的加速,并减少过冲。
使用地面站实时查看前后(又称 x 轴)加速度。如果使用Mission Planner地面站,则打开 "飞行数据 "屏幕,选中 "飞行稳定调整 "复选框(底部中间),双击图表并选择 "ax"。请注意,数值的单位是厘米/秒,因此应除以 100 得到米/秒。
以手动模式驾驶载具,全油门从停止加速到全速
以显示的加速度为指导,设置 ATC_ACCEL_MAX 和 ATC_DECEL_MAX 参数。请注意,显示的数值可能是厘米/秒,而参数的单位是米/秒。如果载具的加速度和减速度相似 ATC_DECEL_MAX 可以留为零
在 Acro 模式下驾驶载具,测试载具的加速是否平稳,减速是否过于迟缓
节流阀回转¶
"这款" MOT_SLEWRATE 参数可用于限制节流阀输出变化的速度。
数值为 100 时,节流阀输出可在一秒钟内全速变化
值为零则禁用限值