QuikTune¶
"这款" 路虎 QuikTune Lua 脚本简化了为载具的转向和速度控制器寻找良好增益的过程。
该脚本应在载具在以下区域盘旋时运行 圆圈模式.它记录转向和油门输出以及由此产生的响应(如载具转弯率和速度)至少 10 秒钟,以便计算前馈增益。然后将 P 增益和 I 增益设置为前馈增益的比率。计算完成后,增益将自动保存。
默认情况下,增益将按此顺序调整:
ATC_STR_RAT_FF那么 ATC_STR_RAT_P 和 I 的比率设置为 FF
CRUISE_SPEED 和 巡航节流那么 ATC_SPEED_P 和 I 的比率设置为 FF
脚本还将调整过滤器设置:
atc_str_rat_fltd 的一半。 ins_gyro_filter 价值
安装脚本¶
设置 SCR_ENABLE = 1 启用脚本,然后重启(飞行)控制器
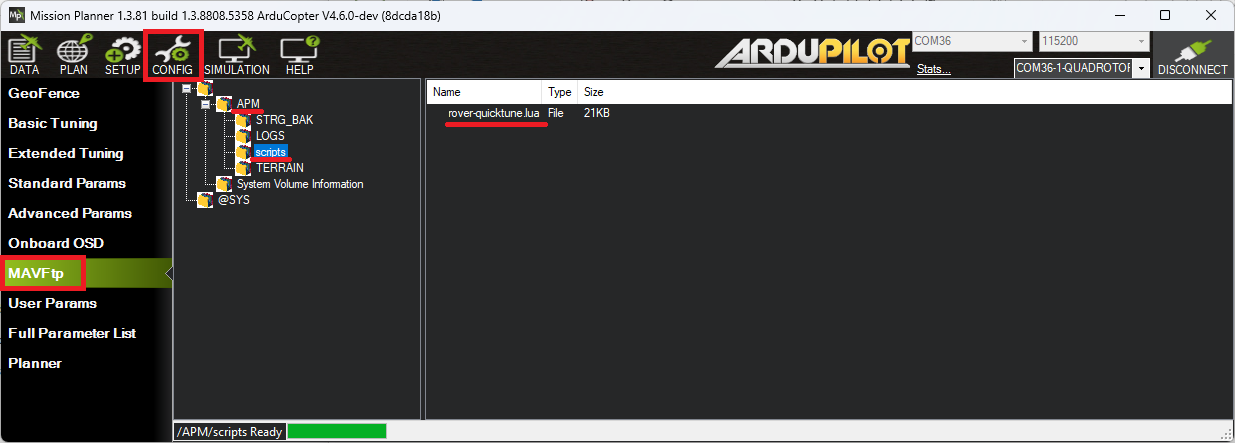
下载 rover-quicktune.lua 到您的电脑
将脚本复制到(飞行)控制器 SD 卡的 APM/scripts 目录中。如果使用 MP,使用 "配置"、"MAVFtp "屏幕可能最简单
重启(飞行)控制器并设置 RTUN_ENABLE = 1
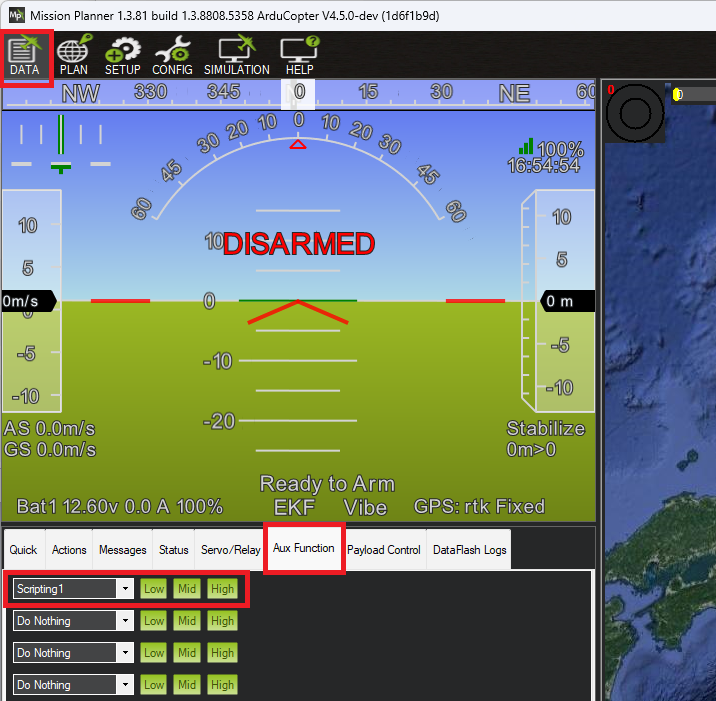
如果将使用遥控开关启动/停止调试,则设置 RCx_OPTION = 300,其中 "x "为遥控输入通道编号。或者将Mission Planner地面站辅助功能选项卡中的一行设置为 "脚本1"。
运行 QuikTune¶
前往 GPS 接收良好的开阔地
连接地面站(如 Mission Planner 或 QGC),确保可以看到 "信息 "选项卡。飞行稳定调整器的输出将显示在这里
将 RC 开关移至低位置,或按下 MP 辅助功能的 "低 "按钮
可选择设置 CIRC_SPEED 到载具最高速度的一半左右
上膛载具,将车开到空旷地带,然后切换到 圆圈模式
将 RC 开关移至中间位置,或按下 MP 辅助功能的 "Mid "按钮,开始飞行稳定调整。
使用 GCS 的 "信息 "选项卡监控飞行稳定调整进度
如果遥控转向杆和油门杆偏离了中心位置,飞行稳定调整将暂停,直到它们移回中心位置几秒钟后才会恢复。
如果载具开始剧烈摆动,将 RC 开关移至低位置或按下 MP 辅助功能的 "低 "按钮,取消调整
调整完成后,新的增益将自动保存
将载具开回家并解除警报
高级配置¶
全部可用清单 参数设置在这里