设置电机范围¶
大多数电调在其量程的底部都有一个死区。本页概述了如何测试该范围的大小,然后适当设置自旋-上膛和最小油门值。
虽然不是必需的,但高级用户可能希望采取下一步措施,测量和调整 发动机推力曲线.
备注
请填写 电调校准 在设置电机量程之前
测量死区¶
从载具上卸下螺旋桨
连接锂电池
使用 USB 电缆或遥测技术将(飞行)控制器连接至Mission Planner地面站
打开Mission Planner地面站的初始设置>>可选硬件>>电机测试页面
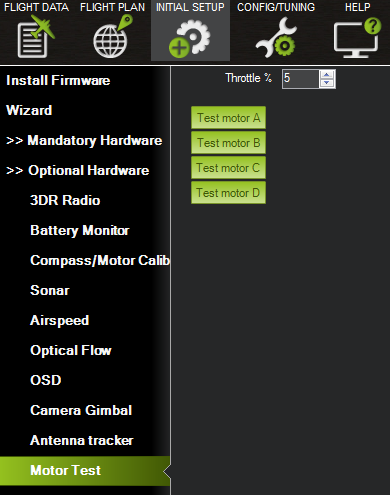
增加 "节流百分比 "字段并按下每个 "测试电机 "按钮,以确定每个电机旋转所需的百分比。如果所有电调都来自同一制造商,它们可能都有类似的死区,但有一两个相差 1%~2%是很常见的。选取所有电机中的最高百分比--我们将在下文中使用。
设置旋臂和最小油门¶
默认情况下,当飞行器已上膛但未飞行时,电机将以比正常速度稍慢的速度旋转。可以使用 MOT_SPIN_ARM 参数(旧版本请查看 MOT_SPIN_ARMED)。一旦飞行器开始飞行,我们要确保永远不会输出导致电机停止旋转的值,这个下限可以配置为 MOT_SPIN_MIN 参数。
设置 MOT_SPIN_ARM 参数改为 (上述发现的百分比+2%)/100.例如,如果发现电调的死区为 7%,则设置为 MOT_SPIN_ARM 为 0.09(即 (7 + 2) / 100)。
设置 MOT_SPIN_MIN 参数至少比 MOT_SPIN_ARM.即如果 MOT_SPIN_ARM 为 0.09,设 MOT_SPIN_MIN 到 0.12。
备注
设置 MOT_SPIN_MIN 如果我们想考虑电池的电压降,甚至比上面建议的更高也是可以接受的,但设置过高会降低电机的低速范围,从而降低控制能力,这一点可能很重要,尤其是对于悬停节流阀较低的大功率旋翼飞行器。
备注
"这款" MOT_SPIN_MAX 参数,用于计算通常不会产生额外推力的电调/电机范围的最高值。默认情况下,该值为 0.95(即最高 5%的范围不会产生额外推力)。
备注
如果使用电调转速遥测,则 TKOFF_RPM_MIN 参数设置可略低于 MOT_SPIN_ARM 参数,以防止在一个或多个发动机不转的情况下尝试起飞以及随后在起飞时翻转。