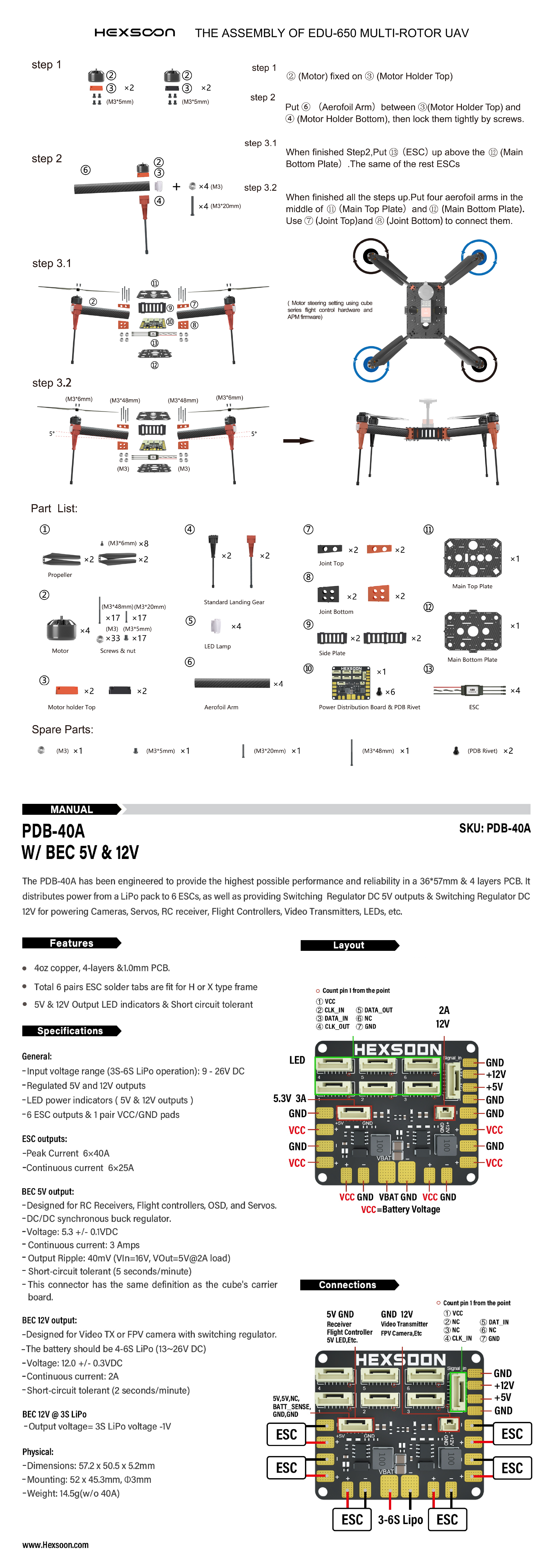
Hexsoon EDU-650¶

Hexsoon EDU-650(原名 TD-650)是一个碳纤维框架,包括电机、PDB、电调和螺旋桨。
该框架可从许多 CubePilot 经销商
Hexsoon's 请点击此处查看 EDU-650 规范
箱子内容¶
650 毫米碳纤维车架
4x 电机 HS4012 370KV
4x 螺旋桨 T-Motor MF1503
4x 电调 Hexsoon 40A
起落架
配电板
附加部件¶
兼容 立方体(飞行)控制器 带直接安装螺钉,用于标准载板
8000mAh 至 12000mAh 6S 电池
至少 6 个通道的遥控发射器
(可选)四 5 厘米(2 英寸)C 形夹钳 便于装配
可选 焊套 缩短电调电线
(可选)2.5 厘米 x 40 厘米尼龙搭扣电池带,用于替换提供的非常短的电池带
连接和设置¶
如图所示,将四根电调导线连接到(飞行)控制器背面。 QuadX 配置
参数文件: hexsoon-edu650.param
也可以使用Mission Planner地面站的 "配置/飞行稳定调整 >>全参数树 "页面加载该参数文件,方法是从右侧中间的下拉菜单中选择 "hexsoon-td650",然后按下 "加载预存 "按钮。
LED 连接和配置¶
每个机械臂的 LED 电缆都应连接到 PDB 的 LED 端口(如下图绿色部分所示),标有 "1 "至 "4"(顺序并不重要)。相邻的 6 针端口(如下图紫色标出)应连接至(飞行)控制器的两个 PWM 输出针脚(例如 AUX OUT 5 和 6)。
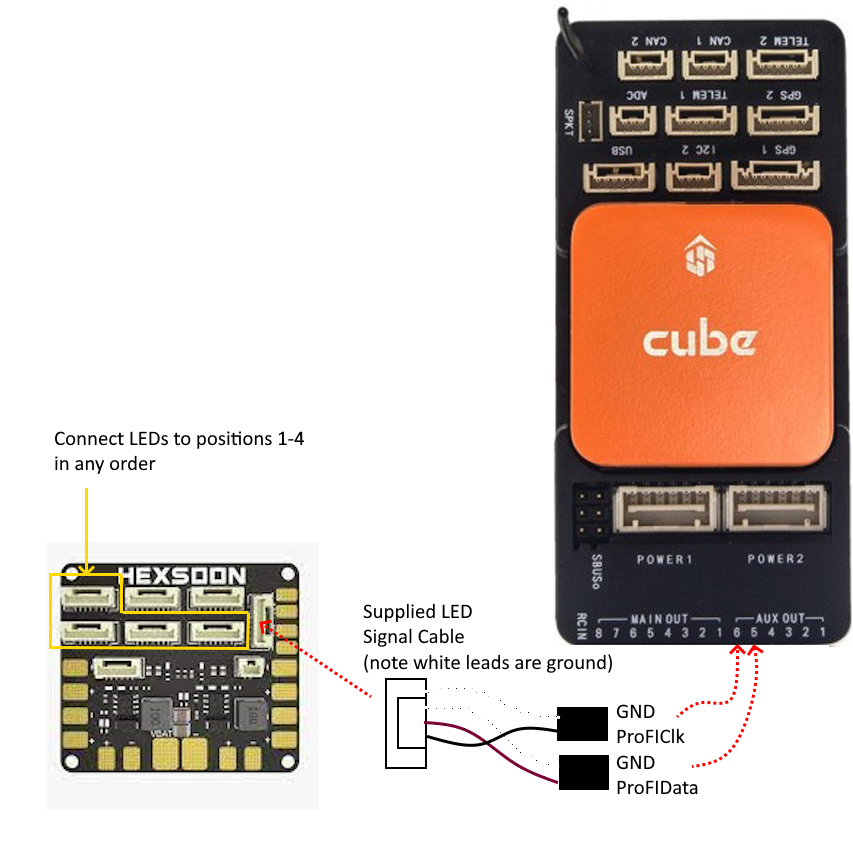
然后在(飞行)控制器上设置以下参数,假设(飞行)控制器的 AUX OUT 5 和 6 引脚已按上图连接
servo13_function = 129 (ProfiLED1)
servo14_function = 132 (ProfiLEDClock)
NTF_LED_LEN = 8
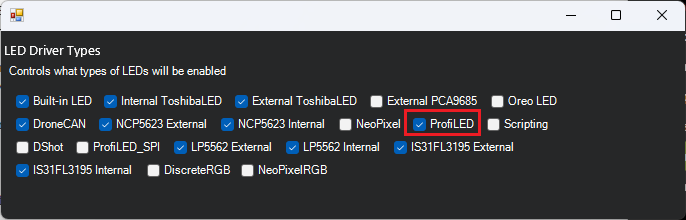
检查 NTF_LED_TYPES ProfiLED" 的位
建设问题和建议¶
以下是问题和建议清单
组装比较困难,因为需要上下两块板将支腿固定到位。暂时使用四个 5 厘米(2 英寸)C 形夹钳 将下板和支腿固定在一起。
电调电线太长,导致接线混乱。可以使用 焊套
如果使用万向节,电池必须安装在载具顶部。两种可能的配置是
使用两个较小的电池,安装在(飞行)控制器两侧机架的顶部。并联时要注意两个电池的电压要相同。
将(飞行)控制器安装在上下板之间,以便在框架顶部安装一个大电池。请注意,这将使(飞行)控制器的检修变得困难。
套件中的 30 厘米电池带太短。用 2 厘米 x 50 厘米魔术贴电池带代替
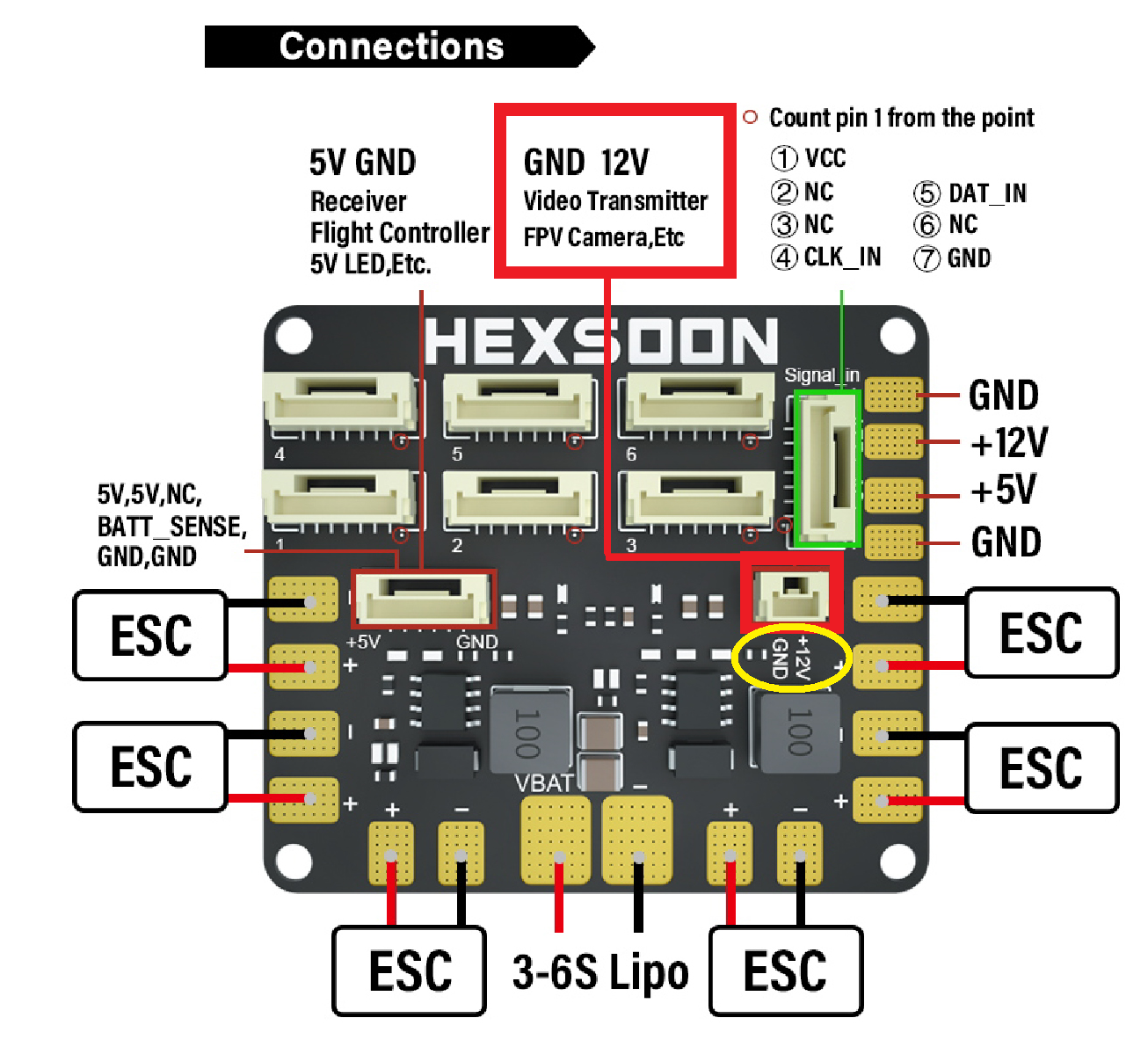
PDB 有一个用于 "视频发射器 "的 12V 引脚,但请注意,与同等的 Herelink 电源线相比,2 针 JST 连接器的 GND 和 12V 引脚是反的。
视频¶
