旋翼飞行器介绍¶
Copter 是一款先进的开源自动驾驶系统,适用于多旋翼飞机、旋翼飞行器和其他旋翼飞行器。它提供 多种飞行模式 从完全手动到完全自主。
作为更广泛的 ArduPilot 软件平台的一部分,它可与各种设备无缝协作。 地面控制站程序 ArduPilot 可用于设置飞行器、实时监控飞行器的飞行并执行强大的任务规划活动。它还受益于 ArduPilot 生态系统的其他部分,包括模拟器、日志分析工具和更高级别的飞行器控制 API。
ArduPilot 已经成为众多商用自动驾驶系统的首选平台,但您也可以用它来增强自己 DIY 多旋翼飞行器的能力。
主要特点¶
主要功能包括
高精度 杂技模式:进行攻击性动作,包括空翻!
自动水平仪 和 高度保持 模式:轻松实现水平直线飞行,或增加 简单 模式,飞行员无需跟踪飞行器的航向。只需按下控制杆,(飞行)控制器就会自动计算出飞行器所处的方位。
返回发射:打开开关,让 Copter 飞回发射地点并自动着陆。
飞行中的临时命令:安装了双向遥测无线电后,只需点击地图,载具就会飞到所需位置。
自主任务:使用地面站定义复杂的任务,最多可定义数百个 GPS 航点。然后将飞行器切换到 "自动 "模式,观察飞行器起飞、执行任务、返航、着陆和解除警报的全过程,无需人工干预。
故障触发保护机制:软件监控系统状态,并在与驾驶员失去联系、电池电量不足或载具偏离规定的地理范围时触发自动返航。
灵活、可定制:能飞的旋翼飞行器 各种形状和大小的载具 因为用户可以访问数百个控制其行为的参数。虽然你不需要接触其中的大部分参数,但如果需要的话,它们还是存在的。
不锁定供应商:ArduPilot 是完全开放源码的,背后有一个由不同开发人员组成的社区。您可以完全控制载具上的软件及其性能。
开始¶
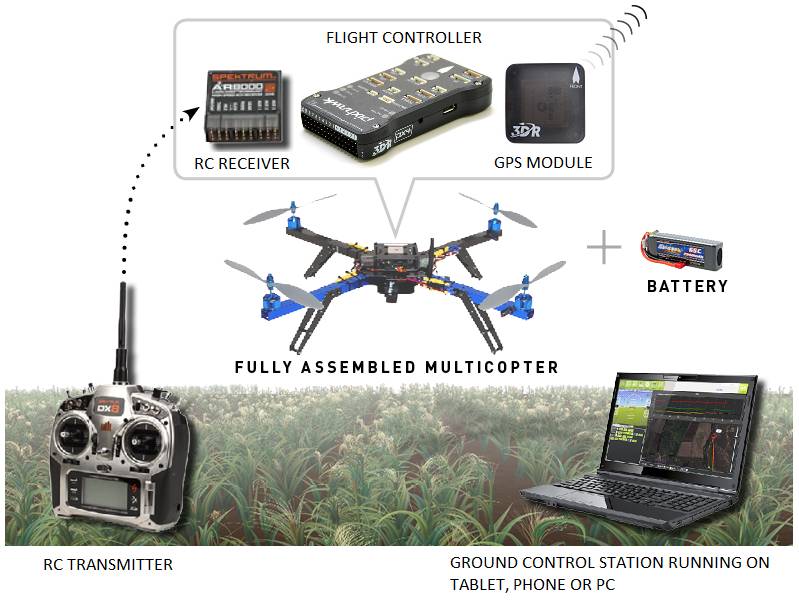
首先,您需要一架带有 与 ArduPilot 兼容的(飞行)控制器.以下是 飞行器 或者您也可以选择自己制作。
如果您在 飞行器 那么它应该是预先配置和调试好的,为您的首次飞行做好了准备。我们建议您在飞行前阅读制造商的说明,尤其是有关安全的部分。然后在 安装地面站 您可以跳转到 首次飞行 指示。
提示
无论是使用 RTF 还是 DIY 载具,自动驾驶载具都具有潜在危险!始终遵循 最佳安全做法 并密切注意所有安全警告。
如果您计划制作自己的多旋翼飞行器,下面的内容将帮助您入门。请先阅读本节,了解多旋翼飞行器的功能,以及如何选择机架、自动驾驶板和其他重要组件。然后继续阅读 首次设置 了解如何组装您的旋翼飞行器,然后 首次飞行 了解如何配置和调整它。