RSC 内部理事¶
ArduPilot 提供了一个内部 RSC 调节器 (H_RSC_MODE =4),适用于外部没有确保转子头恒速的应用。该模式需要设置 H_RSC_THRCRV_x 和 H_RSC_GOV_x 参数和使用 转速传感器 转子头部速度。调速器通过一个比例控制器和一个前馈控制器来保持理想的转子速度,前者通过下垂补偿器进行调整,后者则使用节流阀曲线来帮助应对转子系统的突然加载和卸载。调速器的设计可应对环境条件的变化,甚至是所需转速与节流阀曲线最初调整的额定值之间的变化。这可通过扭矩补偿器来实现,该补偿器可调整节流阀曲线的参考值,以保持所需的转子转速。调速器的设计目的是将所需转速保持在调速器范围内。如果转速超出该范围超过 0.5 秒,调速器将宣布相应的超速或欠速故障,节流阀输出将恢复到节流阀曲线。必须禁用电机联锁才能重置调速器。
此外,还对转子启动进行了改进。调速器使用扭矩限制器来调整转子启动过程中的扭矩上升,使调速器平稳启动。 h_rsc_gov_torque 将决定当转子速度达到转子转速设置值 50% 时转子速度的上升速度(转子转速设置值)。H_RSC_GOV_RPM).调速器的工作顺序如下:节气门从怠速开始根据 h_rsc_ramp_time 使旋翼飞行器离合器接合并启动主旋翼转动。集体飞机应处于平距状态,油门曲线应设置为平距状态下正常转速的至少 50%。自动油门扭矩限制器将自动启动并开始加速主旋翼。一旦调速器接合,就会完成卷绕。
备注
宣布 "运行完成 "的依据仍然是 h_rsc_runup_time.请确保该参数设置为调速器启动留出时间,否则(飞行)控制器将在调速器启动前尝试自主起飞。
调速器设置为
4.1 及更早版本:
H_RSC_GOV_DISGAG:脱离点:建议设置在飞行怠速功率设置(油门曲线上的第一个点)的上方 2%。默认值是调速器在 20% 油门时脱离。h_rsc_gov_droop下垂响应设置:0-100%.这将设定调速器的激进程度。相对于原动机对油门的反应,过高的下垂响应设置会导致调速器对负载变化产生激增或过度反应。对于大多数活塞式发动机来说,85% 左右应该是合适的。涡轮发动机略高。电动发动机则要低得多。h_rsc_gov_range:RPM 范围高于或低于h_rsc_gov_setpnt调速器工作的设定值。如果速度传感器失灵或转速超出此范围,调速器将脱离并返回节流曲线。建议范围为 100 rpm。h_rsc_gov_setpnt:RPM 设定点 - 以 RPM 为单位设置为所需的水头速度h_rsc_gov_tcgain节气门曲线增益 - 设置该增益是为了在负载突然变化时提供节气门曲线前馈。如果它在突然冲出时超速,则减少节气门增益等......可设置范围为 50-100
4.2 及更高版本:
H_RSC_GOV_COMP:调速器扭矩补偿器 - 确定调速器调整基本扭矩基准的速度,以补偿密度高度的变化。
h_rsc_gov_droop:调速器降压补偿器 - 用于补偿转子速度与所需转子速度之间的误差的比例增益。
H_RSC_GOV_FF:调速器前馈 - 在转子系统突然加载/卸载时,对油门响应的前馈调速器增益。
h_rsc_gov_range:调速器工作范围 - 高于或低于转速范围 H_RSC_GOV_RPM 调速器运行的环境。
H_RSC_GOV_RPM:主转子转速 - 调速器启动时保持的主转子转速。
h_rsc_gov_torque:调速器扭矩限制器 - 调整发动机在升至调速器转速期间的扭矩上升百分比。
设置¶
您必须首先设置节气门曲线并进行适当调整。如果传感器出现故障,控制将转到油门曲线。如果没有正确调整的曲线,您的旋翼飞行器就会坠毁。调整油门曲线时,应将其调整到飞机可以轻松飞行的转速。不一定要调到完美,但应该 "足够接近",这样旋翼飞行器在飞行时才不会出现意外。您可以使用以下工具调整油门曲线 H_RSC_MODE =3.
用于内燃机和涡轮动力旋翼飞行器、 H_RSC_IDLE 的设置是为了在不接合离合器或转动主旋翼的情况下启动和运行发动机。在接合电机联锁之前启动(飞行)控制器将把 RSC 输出设置为空闲位置。在 ArduPilot 中解除电机联锁将把电机油门的 RSC 输出设置为 H_RSC_IDLE.在自动着陆或 "着陆 "模式下,一旦检测到着陆,系统将禁用电机联锁,这将解除调速器并将 RSC 输出设置为空闲("着陆 "模式)。H_RSC_IDLE).一旦完成降温,它将自动解除警报并关闭发动机。
调整好油门曲线后,设置 H_RSC_MODE = 4 使 RSC 使用调速器。最初建议根据节气门曲线的转速调整调速器。这将最大限度地减少使用调速器扭矩补偿器的需要,并使调整集中在下降补偿器和前馈设置上。前馈设置可调整调速器中节气门曲线的使用量。如果在使用集体加载转子系统时转子速度明显下降,则可能需要调整前馈。减速补偿器可确保非常精确地保持所需的转子速度。数值越大,对负载导致的巨大转速变化的响应越快,但可能会导致喘振。当调速器对转子系统上的较大负载变化做出响应时,应将该值调整到尽可能积极,而不会出现浪涌或转速超限。
为了研究扭矩补偿器的效果,将所需的转子速度设定为 100-200 RPM,从转子速度开始调整节流阀曲线。调速器扭矩补偿器 (H_RSC_GOV_COMP)应缓慢调节参考输出,以帮助降压补偿器保持所需的转速。如果转速过低或过高超过 2-5 RPM,则每次增加 1%,直到调速器转速与您的转速设置相匹配。补偿器设置过高会导致突波和油门 "打滑"。不要一次进行过大的调整。
扭矩限制器 (h_rsc_gov_torque除非所需的转子速度高于为节流阀曲线飞行稳定调整的转子速度,否则不需要对其进行调整。调速器在启动时无法啮合表明扭矩限制器过低。将该值调高 5%,直到调速器可靠接合。该值也有可能过高,表现为在启动时立即出现调速器超速故障(GCS 上的信息),RSC 将恢复节流曲线。
总督登录¶
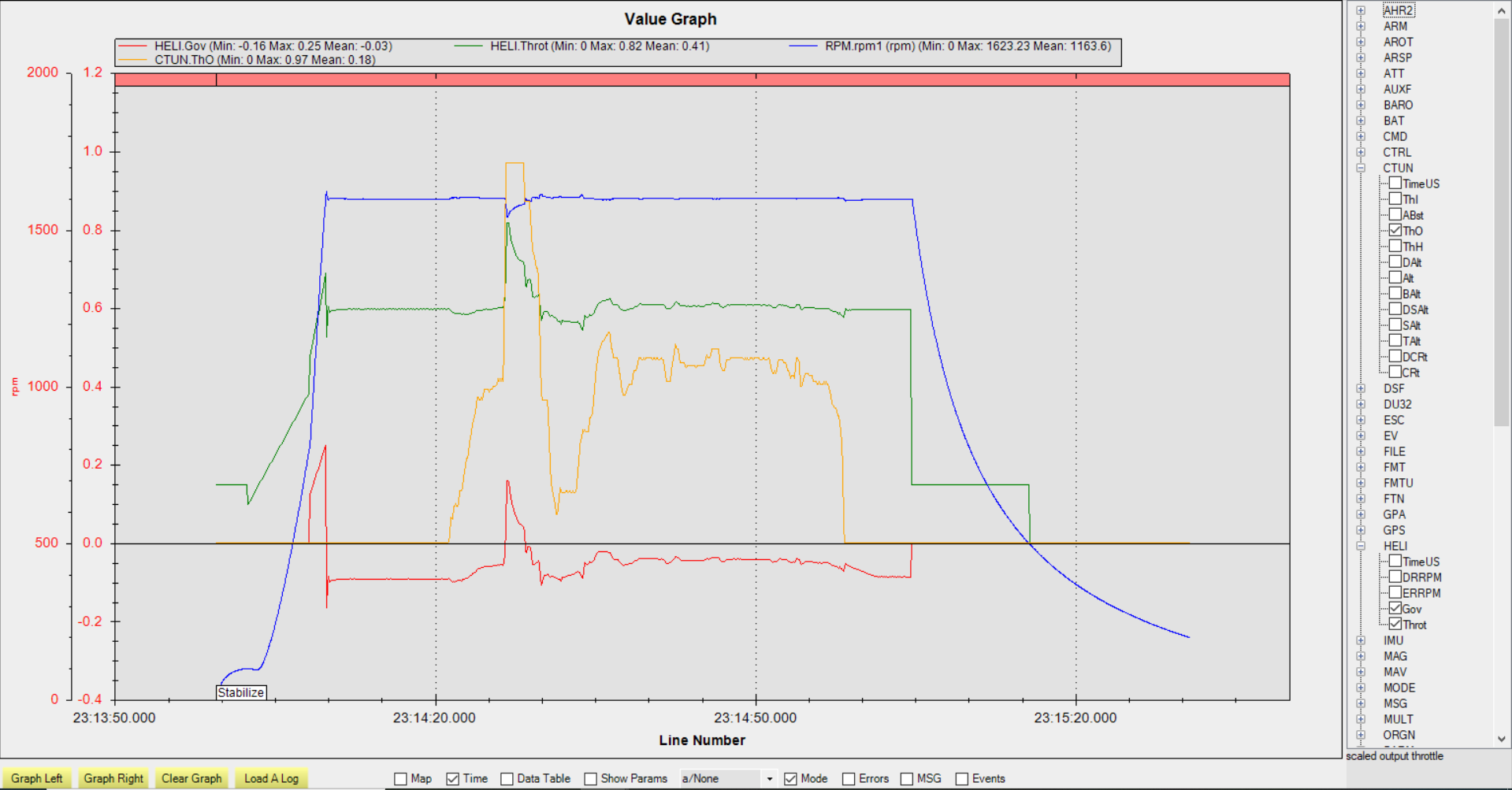
在使用节流阀曲线或内部调速器的模式下,有旋翼飞行器节流阀输出和调速器输出(HELI.x 日志信息)的记录项目 (H_RSC_MODE =3 或 4)。下面是调速器运行的日志图示例。图中显示的是启动过程。调速器扭矩限制器以 50% 的转子速度启动,直至调速器接合。HELI.Gov 信号仅为调速器输出。HELI.Throt 是油门输出,包括油门曲线和调速器。集体显示了在大约 25 秒时急剧的集体输入。大约有 50 RPM 的下降,但很快就恢复了。着陆后,当电机联锁被禁用时,调速器脱离(调速器输出归零)。