转子速度控制设置¶
与其他飞行器(特别是多旋翼飞行器)不同,节流阀/电门 RC 输入通道在任何模式下都不直接控制油门,即使在多旋翼飞行器中被指定为 "非高度控制模式 "或 "非油门控制模式"(如稳定或 ACRO)。相反,它只能在非高度控制模式下直接控制旋翼飞行器的 "集电极"。
备注
但 RC Passthrough RSC 模式除外。通常不建议使用这种模式。
这意味着必须使用某种方法来控制节流阀或 esc,以便在整个飞行包络线内保持恒定的转子速度。
转子速度控制(RSC)使用 heliRSC 输出 (SERVOx_FUNCTION = 31)连接到发动机油门或速度控制/调节器,以控制转子速度。这可以通过几种不同的方式得出:
通过遥控发射机直通或内部节流阀曲线进行开环控制,该曲线会根据集体需求创建相应的节流阀需求。
使用设定点信号连接外部调速器或电子速度控制器
在 ArduPilot 固件中使用闭环调速器。
备注
当电机联锁解除时,该状态有时称为节流阀保持,节流阀被驱动至 H_RSC_IDLE
RSC 还控制 heliRSC 输出,用于地面空转、转子运行和关闭。本维基介绍了 RSC 各项参数的设置。
RSC 模式¶
首先,设置 RSC 模式参数 (H_RSC_MODE).下面列出了 RSC 模式,并附有简短说明。
RC 直通 (H_RSC_MODE = 1) - 该模式通过 RC 通道输入,电机联锁 (
RCx_OPTION=32)分配。通道必须超过 1200us 才能使 heliRSC 输出跟随 RC 输入。否则,heliRSC H_RSC_IDLE.RSC 设定点 (H_RSC_MODE = 2)- 该模式用于使用电子速度控制器或内燃机外部调速器的旋翼飞行器。传递到 HeliRSC 输出的 PWM 由外部电机调速器设定点 (H_RSC_SETPOINT) 参数。输出 PWM 的计算公式如下:PWM 输出 =
RSC_SETPOINT* 0.01 * (SERVOx_MAX-SERVOx_MIN)+SERVOx_MIN其中,SERVOx 是分配给节流阀的输出端节气门曲线 (H_RSC_MODE = 3) - 该模式是 HeliRSC 伺服输出的开环控制。用户需要微调油门曲线,以便在整个飞行包络线内保持所需的旋翼速度。油门曲线是五点花键曲线拟合,由
H_RSC_THRCRV_x参数。它用于根据遥控发射机上的集合(油门杆)确定 HeliRSC 伺服输出。总督 (H_RSC_MODE = 4) - 调速器的设计目的是利用节流阀曲线作为前馈控制,维持用户指定的转子速度。该功能需要一个转子速度传感器。该功能需要一个转子速度传感器。
H_RSC_GOV_x.上述节流曲线模式所需的参数也应为该模式正确设置,因为该模式使用这些参数作为调速器前馈控制的基础。
警告
将 RSC 模式设置为 "RC 直通 "需要配置 RC 接收机以保持马达联锁通道的最后值(默认为通道 8)。如果接收机与发射机失去连接,且接收机配置不正确,马达将关闭,旋翼飞行器将坠毁!这也意味着飞行员必须在任何高度保持或自主模式下控制油门。这可能会非常困难,并可能导致坠机,因此强烈建议不要这样做。这种模式只提供给一些非常专业的高级用户。
H_RSC_MODE =2 将是带有内置调速器模式电调的电动旋翼飞行器最常用的模式。
H_RSC_MODE =3 可用于旋翼飞行器马达的开环控制,不提供恒定的头部速度反馈控制,但通常用于为下面的调速器模式设置前馈节流阀曲线基线。为了使稳定参数保持稳定的调整点,最好使用 RSC 调速器。
H_RSC_MODE 如果没有外部 RSC 调速器,可使用 =4。主要用于内燃机和涡轮发动机。
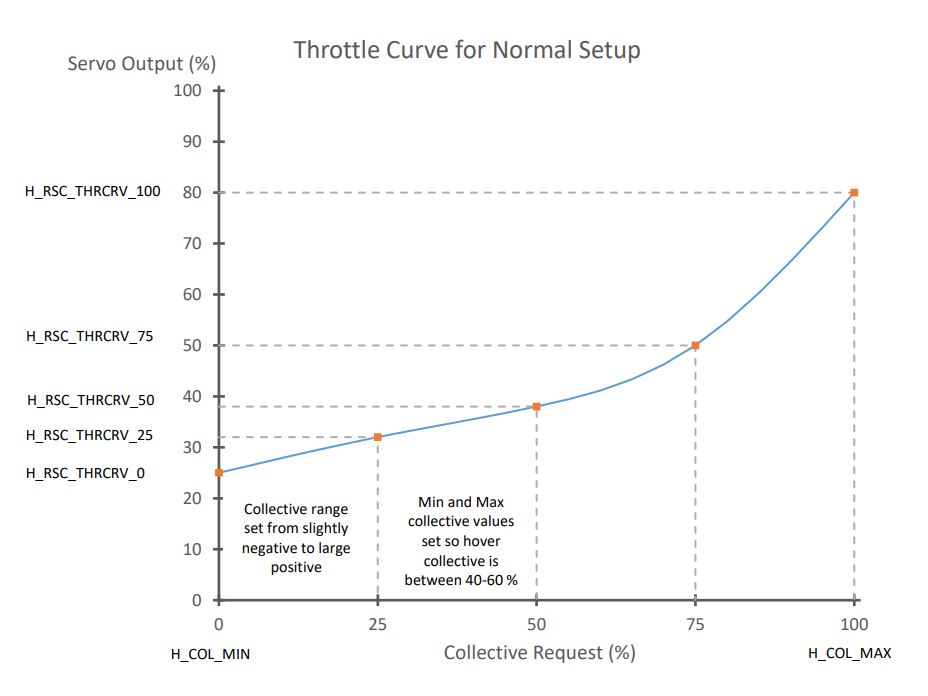
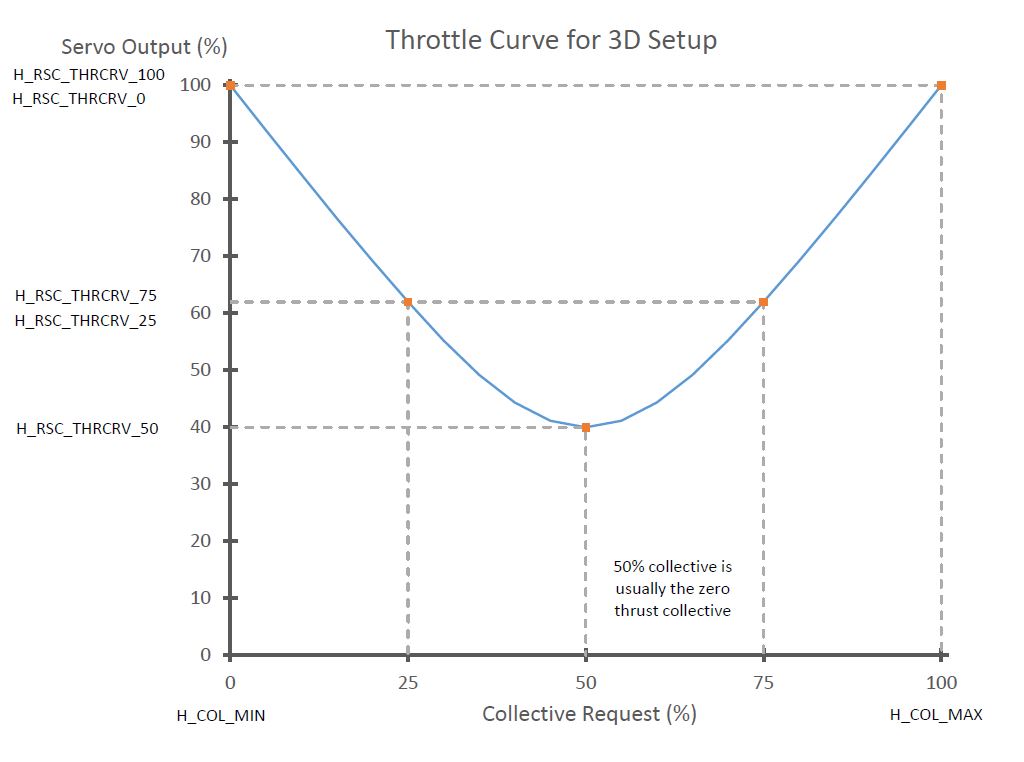
典型节气门曲线 H_RSC_MODE = 3¶
这些也用于 H_RSC_MODE = 4,作为其前馈的基础。
如果集电极范围设置为常规(非气动)设置,即 ~-2deg 至 +12deg,则 H_RSC_THRCRV_X 参数的设置与油门伺服器的驱动类似:
如果设置为特技对称集体范围,即 ~ -12deg 至 +12deg,则应类似地设置油门舵机:
备注
ArduPilot 将在以下两个参数之间进行样条曲线拟合 H_RSC_THRCRV_X 设定点,以产生相对于集合点的平滑油门伺服输出。
转子速度斜坡和怠速设置¶
转子速度控制装置具有怠速设置和油门控制的启动和关闭逻辑。油门输出在 H_RSC_IDLE 参数决定了在飞机上膛后、电机联锁启用前向 heliRSC 伺服输出的输出。
启用电机联锁后,转子速度控制器将使节流阀从空转设置 (H_RSC_IDLE)到飞行设置(这取决于 H_RSC_MODE 选择)的基础上 h_rsc_ramp_time 参数 .在非手动节流阀模式和自动模式下,RSC 将阻止飞机起飞,直到计时器计时结束。 h_rsc_runup_time.设置 h_rsc_runup_time 是指旋翼旋转到飞行旋翼速度所需的时间。该参数必须等于或大于节气门斜坡时间参数 (h_rsc_ramp_time).
当转子处于飞行转子速度时电机联锁被禁用,转子速度控制器将倒计时,倒计时时间与转子速度控制器所指定的时间相同。 h_rsc_runup_time.RSC 将根据临界转速参数 (H_RSC_CRITICAL) 并重置运行完成标记。最好设置临界转子速度参数 (H_RSC_CRITICAL)为运行计时器的一个百分比,相当于约 3 秒钟。例如,如果有一个 10 秒的启动计时器,设置临界转子速度参数 (H_RSC_CRITICAL)到 70% 会导致 RSC 在禁用电机联锁后三秒内宣布旋翼速度低于临界值。对于 4.0 及以前的版本,(飞行)控制器可在 RSC 宣布旋翼速度低于临界值后在自动着陆过程中解除对飞行器的控制。对于 4.1 及更高版本,(飞行)控制器将在 RSC 宣布转子速度低于临界值后等待的时间长度为 h_rsc_runup_time 在自动着陆时解除飞机的上膛。
ArduPilot 内部调速器设置¶
ArduPilot 提供内部转子速度控制,主要用于没有调速器的内燃机或涡轮发动机,但也可用于不提供调速器模式的电动电调。该模式要求
H_RSC_THRCRV_x 参数的设置应使旋翼飞行器能在以下情况下飞行 H_RSC_MODE =3 是安全的,因为它们被用作 RSC 调速器的基线控制曲线,提供控制回路的前馈部分。
参见 RSC 内部理事 了解设置详情。
涡轮发动机启动¶
特殊的遥控辅助功能("159")用于为涡轮发动机提供启动信号遥控开关。当上膛且 RSC 处于空闲状态时,高电平位置会向旋翼飞行器旋翼调速器发出信号,使节流阀升至全速并返回空闲状态,从而向涡轮发动机 ECU 发出信号,启动启动程序。必须将开关调回低位,并解除飞机上膛才能重新启用此功能。
练习(手动)自动旋转设置¶
在 4.4 及更高版本中,增加了从自动旋转中进行动力重新啮合的功能。该功能适用于使用其内部调速器、ArduPilot 节流阀曲线或 ArduPilot 内置 RSC 调速器的电调。
参见 自动旋转 page.