代码概述(旋翼飞行器)¶
"这款" 代码 由以下部分组成 主 Copter 代码 在自己的目录中,而 图书馆 与 Plane 和 Rover 共享。
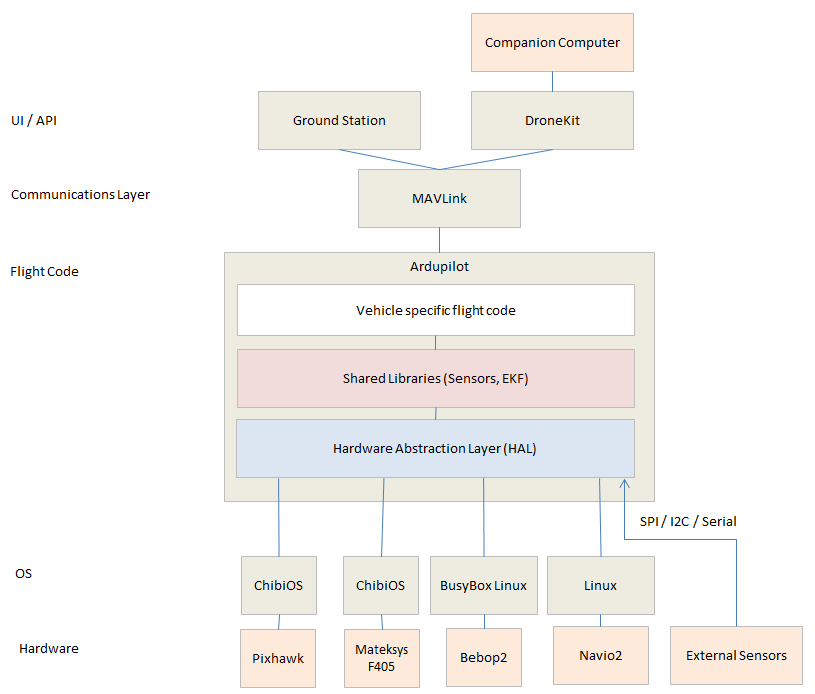
以下是 ardupilot 架构的高级视图。
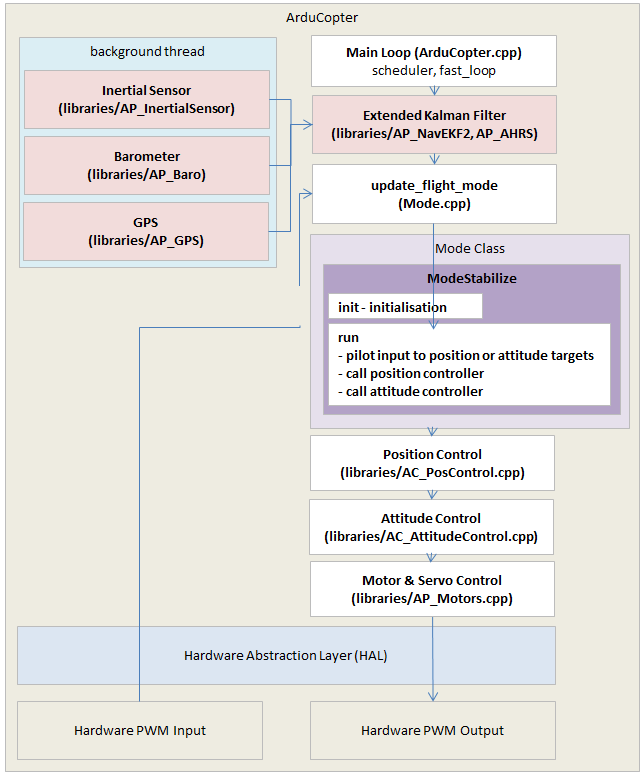
下图是该架构的放大图(与上图相比)。
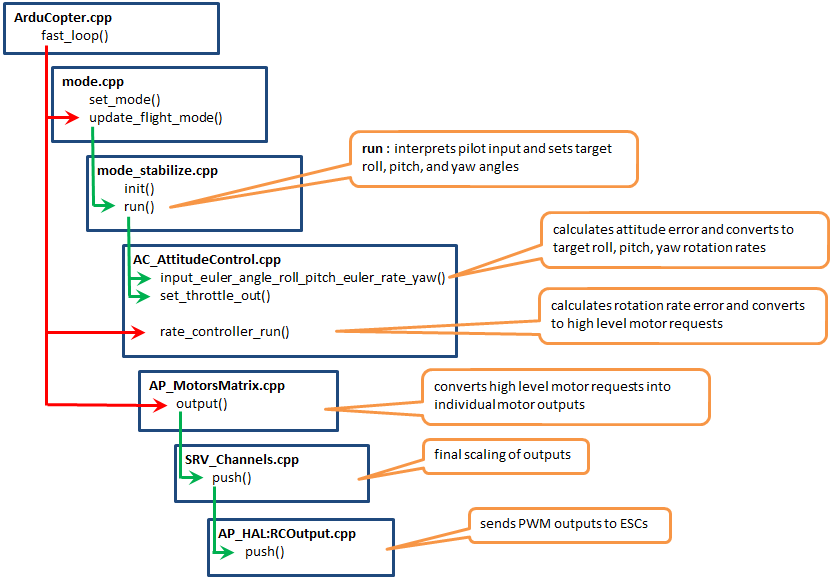
下图显示了 手动模式 (即:稳定、弧形、漂移)
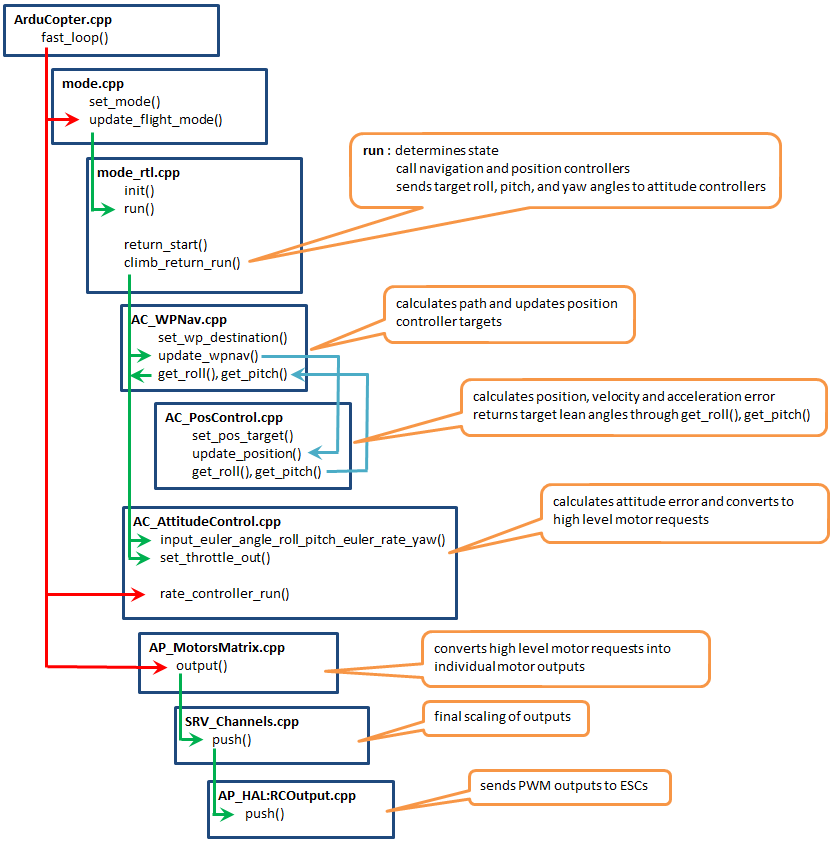
下图显示了 自主模式 (即 RTL、导引、自动)
"这款" 代码 由以下部分组成 主 Copter 代码 在自己的目录中,而 图书馆 与 Plane 和 Rover 共享。
以下是 ardupilot 架构的高级视图。
下图是该架构的放大图(与上图相比)。
下图显示了 手动模式 (即:稳定、弧形、漂移)
下图显示了 自主模式 (即 RTL、导引、自动)