UGV无人车L1 导航概述¶
本页面概述了路虎的导航功能,包括 L1 控制器 也用于 Plane。L1 控制器基于 本文作者为麻省理工学院的 Sanghyuk Park、John Deyst 和 Jonathan P How.
概述¶
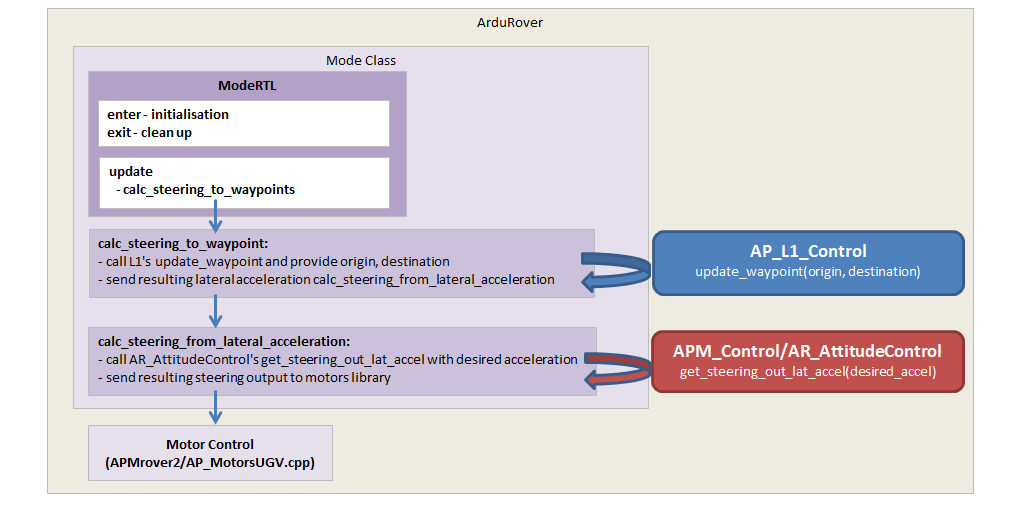
在主循环的每次迭代(50 赫兹)中,都会调用活动模式的更新方法 (以下是 RTL 的更新功能).在 "自动"、"引导"、"RTL "和 "SmartRTL "模式下,更新会调用模式类的 计算转向至航点 方法。
AP_L1_controller 的 更新航点方法 返回所需的横向加速度,并将其输入模式的 从侧向加速度计算转向
模式的 从侧向加速度计算转向 将所需的加速度发送到 APM_Control/AR_AttitudeControl 的 get_steering_out_lat_accel 它使用 PID 控制器计算转向输出
转向输出是通过使用 设置转向 方法
L1 控制器¶
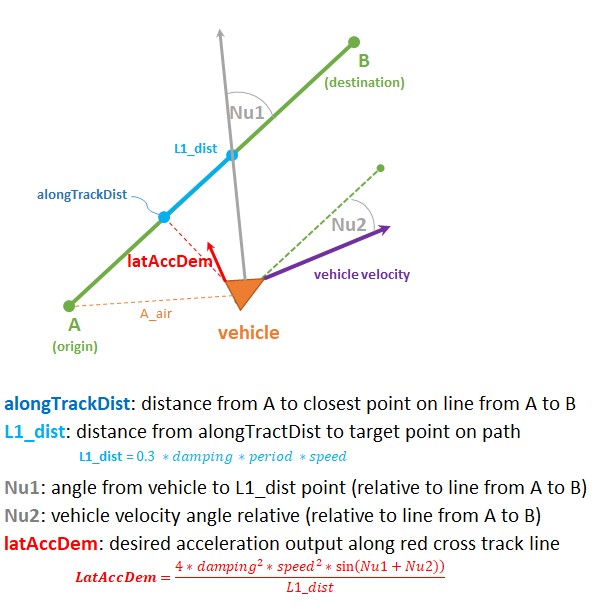
L1 控制器的最终输出为 更新航点方法 是所需的横向加速度(下图红色部分显示为 "latAccDem"),该加速度应使载具回到起点和终点之间的直线上。
使用的公式也如下所示。 阻尼 来自 NAVL1_DAMPING 参数。 时间 来自 NAVL1_PERIOD 参数。