时钟/时间同步¶
飞行控制器和配套计算机的时钟可通过 MAVLink 的 系统时间 和 时间同步 信息。这一点很重要,这样每一方都能将另一方的数据融合到自己的 EKF 中。
mavros 的系统时间插件 实现马夫罗/罗斯方面
ArduPilot 的 AP_RTC 库实现了 ArduPilot 端
马夫罗斯配置¶
马夫罗斯 apm_config.yaml 文件进行修改,以配置 系统时间 和 时间同步 信息以下是建议的设置。
涵:
时间同步速率: 10.0
系统时间率: 1.0
时间:
时间同步模式: MAVLINK
ArduPilot 配置¶
默认情况下,飞行控制器的时间由 GPS 设置,但也可通过以下三种来源(GPS、MAVLINK、机载 HW 时钟)之一进行设置 BRD_RTC_TYPES 参数作为时间同步源的位掩码。使用 mavros 时,设置 BRD_RTC_TYPES = 2,只允许使用 "MAVLINK_SYSTEM_TIME "源的 "MAVLINK_SYSTEM_TIME"。 系统时间 MAVLINK 信息。
如果 RTT 过于 高 对于 时间同步 消息显示在 Mavros 控制台中(使用 ArduRover 时最常见),则 调度循环速率 参数应该增加。因为如果往返时间超过 10 毫秒,Mavros 就会忽略 TIMESYNC 消息。
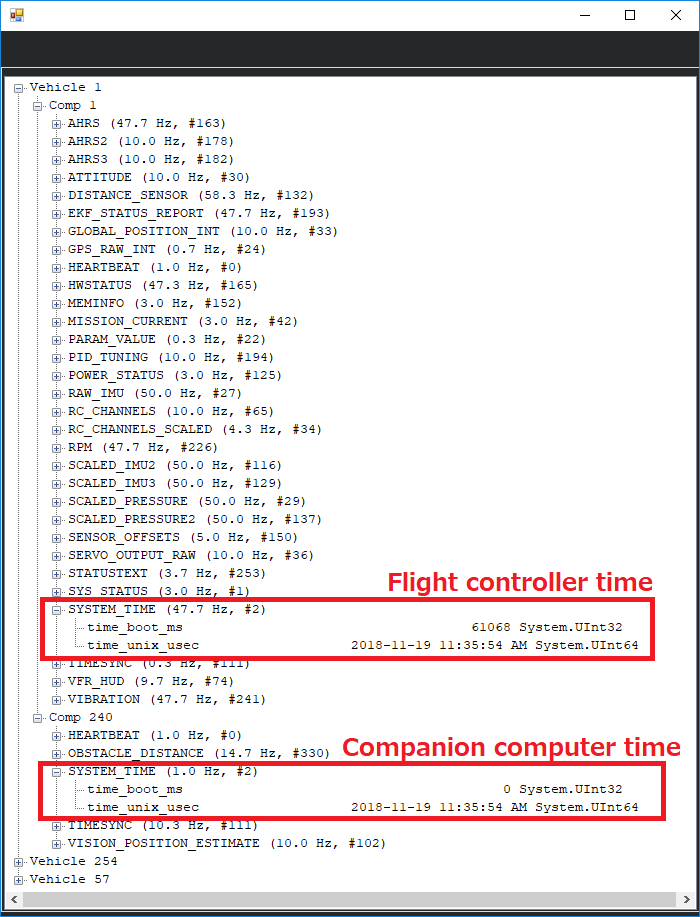
测试¶
可以使用 MAVLink 检查器(可使用 QGC 或 MissionPlanner)检查系统时间是否同步。如果使用 Mission Planner,请按 Ctrl-F,然后按 "MAVLink Inspector "按钮。