从 AP 到 ROS 的数据¶
Mavros 从 ArduPilot 读取 MAVLink 传感器数据信息,并将数据置于 /mavros/ 主题中。
IMU 数据¶
ArduPilot 可使用 MAVLink 的加速度计、陀螺仪和指南针(又称 "磁力")向 ROS/mavros 发送数据。 RAW_IMU 留言
mavros 会消耗这些数据,并将其放置在以下主题中:
/mavros/imu/data 和 /mavros/imu/data_raw 保存加速度计(称为 "linear_acceleration")和陀螺仪(称为 "angular_velocity")的数据
/mavros/imu/mag 保存罗盘数据。如果 AP 的 COMPASS_USE 参数设置为零,则数据可能全部为零。
检查和设置数据传输速率¶
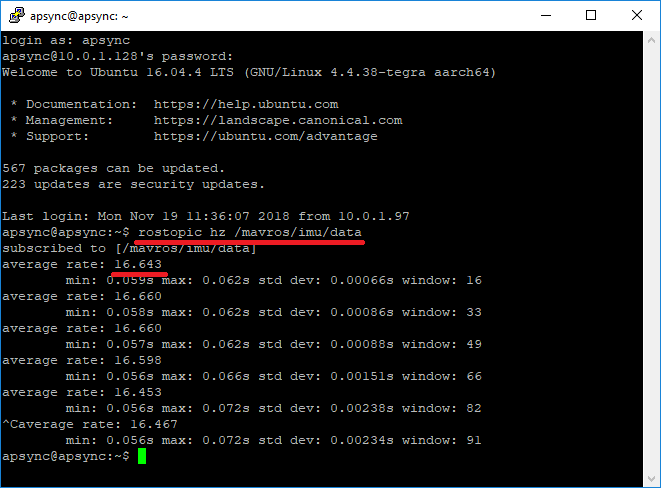
运行以下命令,在运行 ROS 的配套计算机上查看加速度计和陀螺仪数据及更新率
游标 回响 /马夫罗斯/伊木/数据 <-- 至 看看 的 数据 它本身
游标 赫兹 /马夫罗斯/伊木/数据 <-- 至 观点 的 更新 费率
mavros 可用于向 ArduPilot 发送改变数据速率的命令,如下所示
玫瑰 马夫罗斯 mavsys 费率 --一应俱全 10 <-- 至 设置 的 数据 费率 对于 一应俱全 数据 至 10赫兹
玫瑰 马夫罗斯 mavsys 费率 --额外1 10 <-- 至 设置 的 数据 费率 对于 IMU_RAW 至 10赫兹
玫瑰 马夫罗斯 mavsys 费率 --帮助 <-- 至 看看 帮助 关于 此 指挥部
在 ArduPilot 中,发送至 ROS/mavros 的 IMU 数据的默认更新率可通过更改 SRx_EXTRA1 参数(其中 "x "通常是飞行控制器上的串行端口号)来设置。
警告
用户 APSync 可能会注意到 APWeb 每 10 秒将数据流速率重置为 4 赫兹。这是一个 已知问题 这可以通过编辑 /etc/rc.local 文件并注释掉启动 APWeb 的行来解决。
备注
如果您发现 AP 发送数据的速率高于要求的速率,可能是因为 本期