从 rviz 发送命令¶
rviz 可实时查看飞行器的本地位置和姿态、激光雷达数据以及 制图师的 3D 地图.也可以设置一个本地位置目标,然后让 ROS 的导航库(在 ArduPilot 速度控制器的帮助下)将载具移动到目标位置。
这些指令在一台 Nvidia TX2 运行 APSync 图像 按描述安装了 ROS 这里.本页面的部分信息来自这些维基页面:
客户端电脑设置¶
在客户端电脑(rviz 将在此运行)上安装 ROS "Desktop-Full"。
连接到车载无线接入点(如果使用 APSync,默认用户名/密码为 ardupilot/ardupilot)。
打开命令提示符,检查能否 "ping "到运行 ROS 的同伴电脑。如果使用 APSync,这两个命令都应该有效
乒 10.0.1.128
乒 apsync.当地
使用您喜欢的编辑器,打开
/etc/hosts文件(可能需要使用 sudo),并确保配套电脑出现在列表中。以下是同伴电脑运行 APSync 时应显示的内容
10.0.1.128 apsync.当地
10.0.1.128 apsync
在新的命令提示符中,键入
主机名以获取客户端电脑的名称使用您最喜欢的编辑器,将以下两行添加到
~/.bashrc
出口 ROS_HOSTNAME=您的-东道主-名字.当地 <--- 取代 的 客户 个人电脑在此输入姓名
出口 ROS_MASTER_URI=http://apsync.当地:11311
配套电脑设置¶
用 ssh 登录配套电脑。如果使用 APsync,以下方法应该有效(密码为 "apsync"): 1.
ssh apsync@apsync.当地
使用您喜欢的编辑器,将以下几行添加到
~/.bashrc
出口 ROS_HOSTNAME=apsync.当地
出口 ROS_MASTER_URI=http://apsync.当地:11311
检查客户机上是否有 ROS 数据¶
要确认客户笔记本电脑能否从载具上获取数据,请尝试执行以下命令
游标 清单
游标 回响 /机器人姿势
启动 rviz¶
在客户端电脑上启动 rviz
玫瑰 rviz rviz
查看实时激光雷达数据
在 "显示 "区域,选择 "添加"、"激光扫描 "和 "激光扫描仪"。
添加后,展开 "LaserScan "部分并将 "主题 "设置为"/scan"。
查看环境地图
选择 "添加"、"地图
添加后,展开 "地图 "部分并将 "主题 "设置为"/map"。
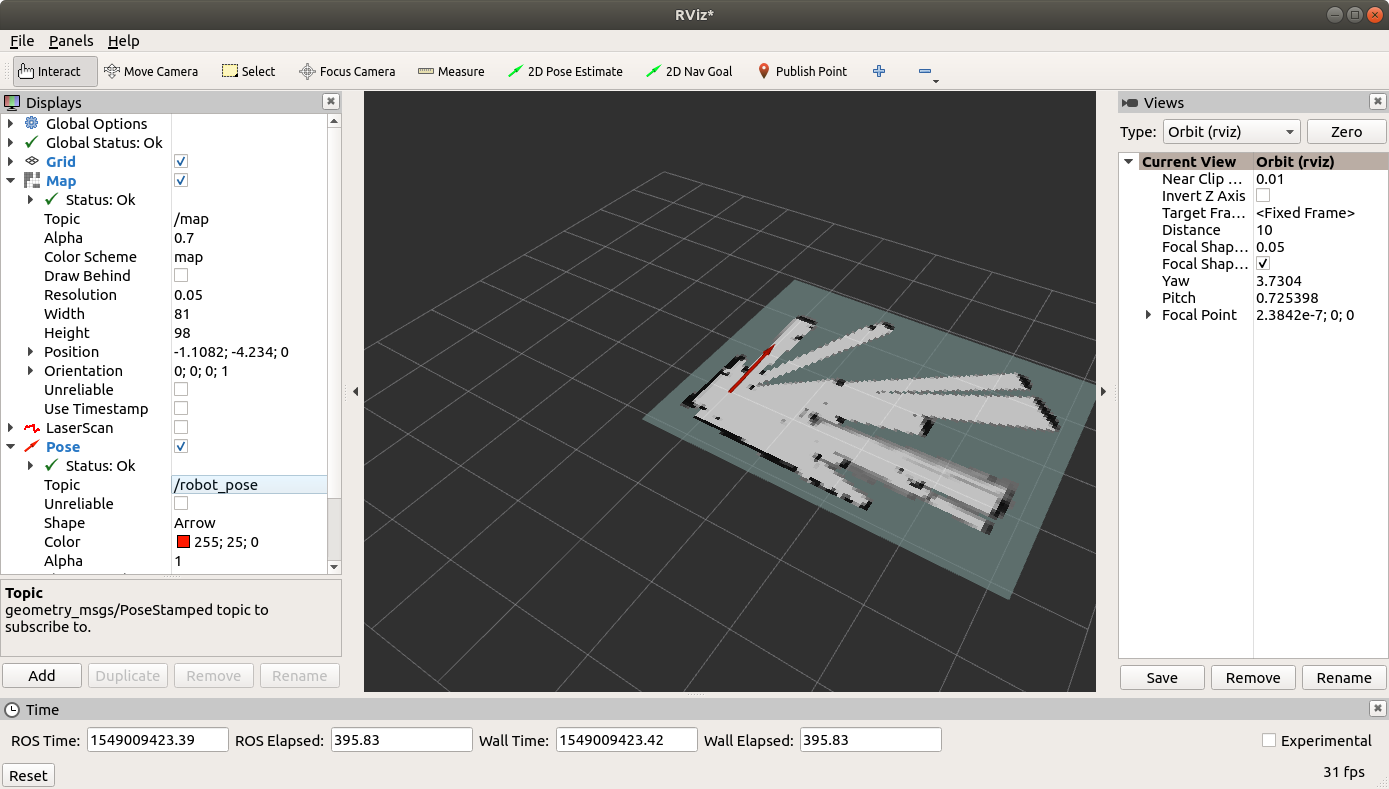
查看载具的当前航向(根据 ROS)
选择 "添加"、"姿势
添加后,展开 "姿势 "部分并将 "主题 "设为"/robot_pose"。
发送位置目标¶
要让 ROS 通过 mavros 向 ArduPilot 发送位置目标,请登录运行 ROS 的伴侣计算机,并使用您喜欢的编辑器(如下所示的 gedit)修改 mavros 的 node.launch 文件。
roscd 马夫罗斯 <-- 此 假设 马夫罗斯 有 一直 安装 与 rosdep
CD 启动
苏都 编辑 网站.启动
之后
<rosparam command="load"; file="$(arg config_yaml)"; />;添加如下一行,并重启所有 ROS 进程
<;重映射 从="/mavros/setpoint_position/local"; 至="/move_base_simple/goal"; />;
上膛载具并切换到制导模式
在 rviz 中单击 "2D 导航目标 "按钮,然后在地图上单击并按住鼠标键以瞄准绿色箭头(这将设置目标位置和最终姿态),然后松开鼠标键。
地面站应显示飞行器正向目标位置移动(Mission Planner地面站在目标位置投下绿色标记,并从飞行器向目标划出一条橙色线)。
如果一切不尽如人意,以下命令可能有助于诊断问题
游标 信息 /move_base_simple/goal出版者应显示为 "rviz",订阅者应显示为 "mavros"游标 回响 /move_base_simple/goal在设置 "2D 导航目标 "后,应立即显示 "位置 "和 "方向"。玫瑰 rqt_graph rqt_graph显示 ROS 节点及其连接的图形图表