用于避开物体的 ROS¶
本页介绍如何设置 ROS 的基本本地规划器 为 ArduPilot 提供速度指令,以引导漫游车绕过障碍物。假设所有先前的设置包括 制图师 和 rviz 已经完成。
这些指令在一台 Nvidia TX2 运行 APSync 图像 按描述安装了 ROS 这里.
本页面的部分信息来自这些维基页面:
备注
这些页面正在制作中
配套电脑设置¶
用 ssh 登录配套电脑。如果使用 APsync,以下方法应该有效(密码为 "apsync"): 1.
ssh apsync@apsync.当地
使用您最喜欢的编辑器(如下图所示的 gedit)修改 mavros 的 node.launch 文件,配置 mavros 以将速度目标发送至 ArduPilot
roscd 马夫罗斯 <-- 此 假设 马夫罗斯 有 一直 安装 与 rosdep
CD 启动
苏都 编辑 网站.启动
之后
<rosparam command="load"; file="$(arg config_yaml)"; />;添加如下一行
<;重映射 从="/mavros/setpoint_velocity/cmd_vel_unstamped"; 至="/cmd_vel"; />;
安装 ros-kinetic-navigation 软件包
苏都 适切-获取 安装 玫瑰-动力学-导航
下载 ArduPilot/companion/Common/ROS/ap_navigation.zip 到 catkin_ws/src 目录中
CD ~/catkin_ws/来源
wget https://github.网/ArduPilot/同伴/未经加工的/师/常见问题/ROS/ap_navigation.压缩
解压 ap_navigation.压缩
重建包括 ap_navigation 在内的所有软件包
CD ~/catkin_ws
消息来源 发展/设置.敲击
柔荑花序 构建
发送位置目标¶
上膛载具并切换到制导模式
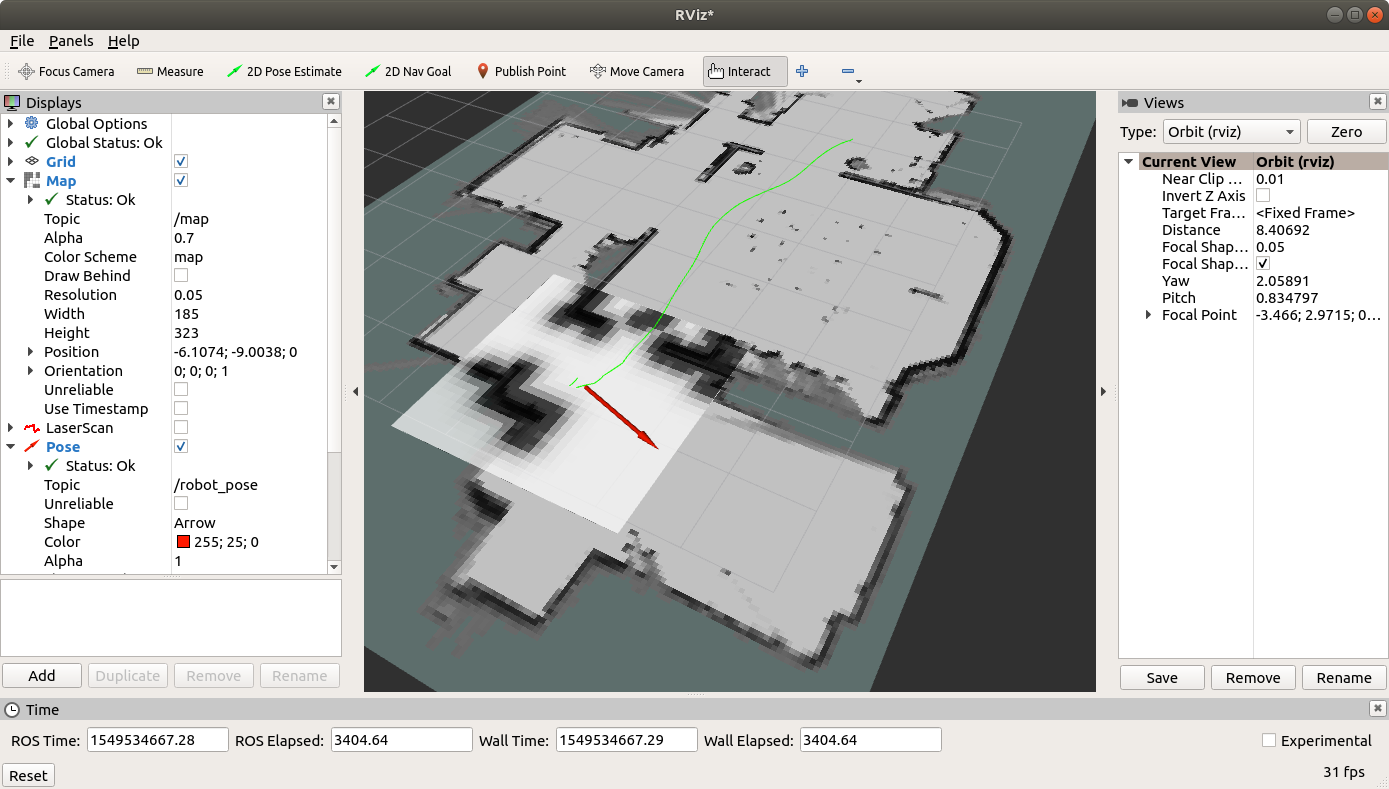
使用 rviz的 "2D 导航目标 "按钮来设置位置目标。如果一切顺利,就会出现一条绿线,显示载具到达目标的路线(见上图)