自动着陆¶
本文介绍了如何作为任务计划的一部分让 Plane 自主着陆,并包含了如何安全终止着陆的信息。切换到 "自动 "模式并执行自动着陆也可作为 RTL 操作,使用 DO_LAND_START 任务指挥部。
配置自动降落¶
要让飞机自动着陆,您需要添加一个 NAV_LAND 在飞行任务结束时,飞行器会发出指令,指示所需的着陆点的经度、纬度和高度,以及是否允许放弃自动着陆。到达前一个航点后,飞机将下降并导航至着陆点。
大多数情况下,高度应设置为 0。 在着陆的最后扩口部分,(飞行)控制器将关闭油门并保持当前航向,由下述参数控制。
对于许多载具,与自动着陆相关的大部分参数都可以保持默认值。对于未使用空速传感器和/或测距仪的载具,基本参数将在下文的基本自动着陆部分介绍。有关更高级的配置,请参阅下面列出的章节:
基本自动着陆¶
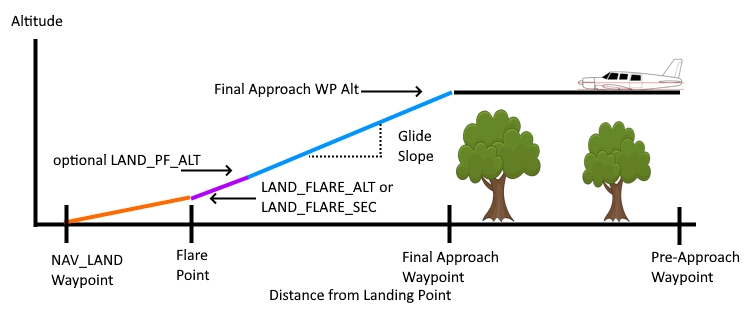
自动降落的阶段包括
通过最终进场航点
在 "滑行斜坡"(即有控制的下降)上导航到照明点
照明弹和触地
设置进场航点¶
在到达 NAV_LAND 航点(您希望着陆和着陆的位置)之前的最后一个导航航点后,自动着陆开始。该航点必须距离着陆点足够远,且高度能够获得合理的滑行斜率。如果没有空速传感器,速度将是正常航点导航的速度。 TRIM_THROTTLE.重要的是,滑行坡度要能与 TECS_SINK_MAX 您可以通过调整进场空速来缩短耀斑时间,并减少可能出现的着陆点过冲。您可以降低进场空速,以减少耀斑时间和可能出现的着陆点过冲,方法是调整 TECS_LAND_THR 的值小于 TRIM_THROTTLE.注意,不要降得太低,以免造成进场时失速。
此外,NAV_LAND 之前的最后一个导航航路点必须足够远,以便飞行任务在该航路点的任何转弯都已完成,飞行器可以沿着一条直线返回着陆点。通常使用两个航点。第一个航路点允许任何任务项目(包括自动着陆重试的中止绕行)对准另一个航路点,该航路点的设置更接近着陆点,但仍能提供良好的滑行坡度。如上图所示,我们将把 NAV_LAND 之前的最后一个航点指定为 "最终进近 "航点,而把它之前的航点指定为 "预进近 "航点。下图显示了这些航点 错误 没有足够的间距:
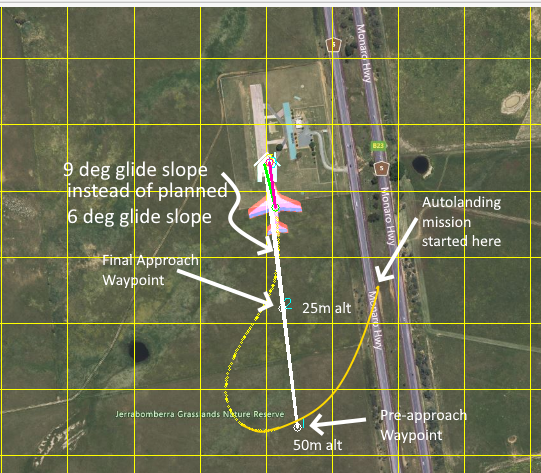
上图显示了一个计划进场,预进场航点距离着陆点 440 米,高度为 50 米,最终进场航点距离着陆点 220 米,高度为 25 米,理应有 6 度的平缓滑行斜率(即以 15 米/秒的空速下降 1.7 米/秒)。然而,实际结果却是 9 度的滑行路径,因为切换到自动模式和着陆序列是在黄色路径起始点开始的,而在两个航路点产生的过冲导致最终进场航路点和着陆点之间的滑行斜率更陡(9 度)。如果将航点间距稍稍拉远一些,就可以在最终进场航点前稳定下来,并达到理想的最终滑翔坡度。飞行器飞行速度越快,转弯半径越大,航点间距也应越大。
备注
您可以使用 QGroundControl 自动设置进场和着陆航点,但它使用的方法略有不同。使用 "计划 "屏幕上的 "降落 "按钮,QGroundControl 将在其向导的滑翔坡度参数所确定的距离处添加一个 "LOITER_TO_ALT "航点(NAV_LOITER_TO_ALT),使飞行器下降(或上升)至进场高度,并添加一个 DO_LAND_START 航点(请参阅 "降落 "屏幕)。 如何放弃自动降落)标记和一个 NAV_LAND.
控制自动降落的关键参数是
备注
TECS 参数与滑行斜率和最后的耀斑下沉控制有关。因此 TECS 速度/高度控制器 必须正确飞行稳定调整,载具必须具有良好的音高飞行稳定调整,TECS 才能正常运行(参见 飞行稳定调整)
每个参数的含义和建议值如下。
设置扩口点¶
耀斑 "是着陆的最后阶段,此时(飞行)控制器会切断油门并升高俯仰角,增加阻力并减缓飞机的速度,使其沉入地面。耀斑的适当时间取决于飞机的类型,并由(飞行)控制器控制。 空地 和 土地面积 参数
照明弹的第一个控制按钮是 土地面积 参数。这是飞机以当前下降速度继续飞行时撞击地面前的时间(以秒为单位)。
因此,如果飞机以每秒 2 米的速度下降,而您设置了 土地面积 那么飞机将在离地面 6 米的高度发射信号弹。通过使用撞击时间来控制照明弹,如果飞机下降较快,就能在较高的高度照明,如果下降较慢,就能在较低的高度照明。这有助于确保信号弹能够顺利着陆。
第二个控制器是 空地.这是以米为单位的离地高度,无论飞机的下降速度如何,飞机都将在该高度耀斑。重要的是,该值应接近于通常情况下飞机下降时的高度。 土地面积,因为在后面的计算中会用到。改变着陆前最后一个航点所需的下降率将影响着陆时的高度。 土地面积 将被激活,并应做出相应调整。
这两个参数的适当值取决于(飞行)控制器如何估计离地高度。
如果完全依靠气压计来确定着陆高度,则可能需要更高的数值,以考虑气压误差(见 "气压误差")。 改进着陆 下同)。默认值通常适合翼展为 1-1.5 米的飞行器。
如果飞行器(姿态和 TECS)调试得非常好,并使用测距仪,就可以尝试在较低的高度启动照明弹。
控制滑行坡度¶
设置耀斑点的另一个重要因素是滑行斜率。滑行斜率是最后一个航点到着陆点的距离与最后一个航点和着陆点之间高度差的比值。例如,如果着陆点距离最后一个航点 300 米,而最后一个航点距离地面 30 米,那么滑行斜率就是 10%。
如果滑行坡度太陡,飞机将无法及时扩飞以避免坠毁,而且(飞行)控制器可能无法将飞机准确地保持在进场坡度上。建议您在开始时将滑翔坡度控制在 10%。您的飞机能承受多大的滑行斜率取决于您的俯仰控制器调试有多好,TECS 调试有多好,以及您要求的着陆速度。
如果您发现飞机没有准确地按照所需的滑行坡度飞行,则应首先检查日志中的螺距调整,并确保在着陆时,要求的螺距和实现的螺距在几度范围内匹配。如果不一致,则查看有关俯仰调整的文档(或重新运行自动调整)。如果要求的螺距和实现的螺距匹配,则应检查 TECS 日志,确保着陆时要求的空速和实现的空速匹配。请查看 TECS 调整页面 了解更多信息。
您还应该知道,许多模型飞机都可以进行长距离滑翔,而您所要求的滑翔坡度和空速组合可能根本无法实现。
控制照明弹¶
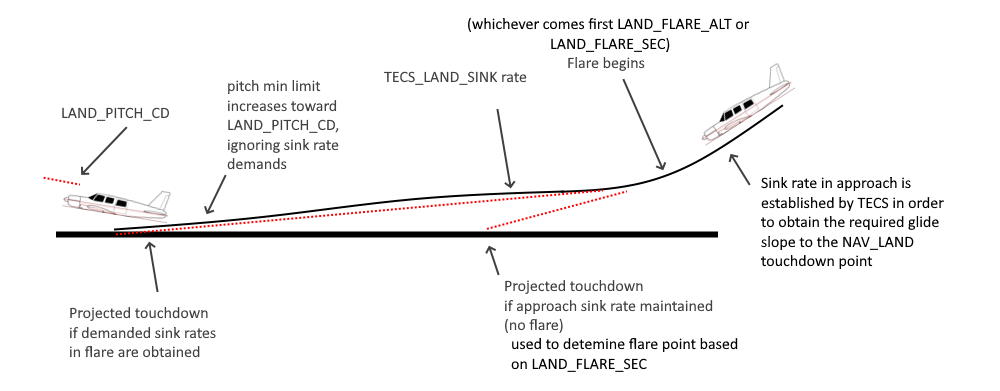
着陆的最后阶段称为 "耀斑"。在耀斑过程中,飞机试图沿着最后一个航路点和着陆航路点之间的线保持航向,并完全使用目标下降率控制高度。一旦耀斑开始,油门将被 "禁用"--设置为介于以下两个值之间的某个值 THR_MIN 和零。
(飞行)控制器在耀斑过程中的主要任务是尽量达到飞行程序中规定的下降速度。 TECS_LAND_SINK 参数。默认值为 0.25 米/秒,对于大多数机型来说,这是一个合理的触地垂直速度。为达到该速度,TECS 控制器仅使用俯仰控制,因为电机已被迫归零。
影响飞机能否达到预期下降率的主要参数有 LAND_PITCH_DEG, TECS_LAND_DAMP 和主要音调参数。
备注
如果飞行器没有良好的螺距调整,飞行器的 CG 明显 "机头重",或者螺旋桨滑流增加了升降舵,那么飞行器实际达到所需的下沉率和姿态的能力就会受到严重影响。症状是着陆时间短,和/或机头/鼻轮先着地。
着陆控制器将着陆前的一个点设定为预期的耀斑起始点。这个 "flare_aim "点是根据 空地 和 TECS_LAND_SINK 为实际着陆前耀斑的预期持续时间。如果持续着陆时间过长或过短,可使用 土地用途 参数。如果着陆时间太短,则将百分比从默认的 50%降低,反之,如果着陆时间太长,则将百分比提高。
从滑翔斜面下沉率到耀斑下沉率的过渡受控于 TECS_FLARE_HGT 参数,通常应设置为 空地.耀斑开始于 空地 沉降速度将逐渐调整为 TECS_LAND_SINK 在 TECS_FLARE_HGT 以避免在耀斑开始时快速改变螺距,因为这样会在耀斑开始时产生 "气球 "效应。请参见本节末尾的注释,以了解是否有例外情况。 TECS_FLARE_HGT 低于 空地.
"这款" LAND_PITCH_DEG 参数设置耀斑结束时的最小螺距目标(单位:厘度)。该参数与机身密切相关,目的是防止飞机着陆时机头过低,造成起落架损坏或螺旋桨折断。对于大多数飞机来说,这应该是一个很小的正数(如 300,即 3 度),但对于一些腹部着陆的飞机来说,一个很小的负数也是不错的,这样可以让机头保持在较低的位置,以减少在离地太远时发生失速的几率。
请注意,飞机的实际俯仰角可能会高出很多。 LAND_PITCH_DEG 因为 TECS 控制器试图控制下降速度。最大螺距由 TECS_PITCH_MAX 如果参数不为零,则通过 ptch_lim_max_deg 参数。
但是,如果由于CG、调整等原因,飞行器在甩尾后期无法保持所需的俯仰姿态。 LAND_PITCH_DEG 可能永远达不到,导致机头/机鼻轮首次触地得分。在这种情况下,设置 TECS_FLARE_HGT 上图 空地 参数,有效地允许 LAND_PITCH_DEG 限值立即生效,并提高要求限值的速度(即在耀斑开始时,而不是在耀斑结束时)
"这款" TECS_LAND_DAMP 参数是耀斑期间俯仰控制的阻尼常数。数值越大,螺距需求变化越慢。该参数可用于减少耀斑发生时俯仰突然变化的问题。
备注
您可以使用 搅拌棒 以便在调整上述参数的同时,根据需要在耀斑过程中进行手动调整。
备注
对于大多数调整良好的飞行器来说,所有着陆参数的默认值都应能实现安全着陆。迭代调整高度限制和瞄准点参数通常可以实现几乎完美的、可重复的着陆。分析 TECS.dh 与 TECS.dhdem 和 ATT.Pitch 与 ATT.DesPitch 的日志将显示飞行器在耀斑过程中达到预期姿态和下沉率的情况。
耀斑过后¶
飞机熄火后继续导航,但油门为零。导航方向是从最后一个航点向前推算出的一条通过着陆点的直线。请注意,导航滚动将限制在 滚动限制 (默认为 5 度),以防止机翼撞击,因此如果有明显的横风,飞机很可能无法保持准确的航线。
如果您的飞机降落时间持续过长(原因可能多种多样),您可以调整 TECS_LAND_SRC 来强制失速(负值)或降低失速(正值)。该值将调整您的 TECS_LAND_SRC 与降落点的距离成正比。这有助于确保您在距离着陆点合理的距离内着陆。
备注
造成着陆时间过长的可能原因包括地面效应使飞机在接近地面时获得更大的升力,或者仅仅是飞机飞行速度太快。
当飞机停止飞行 解除警报延时 秒(默认为 20 秒)后,电机将解除警报。您还可以选择在 LAND_DISARMDELAY 触发后禁用伺服运动,方法是设置 然后.
扩口和翻滚时的舵控制¶
如果启用,地面转向控制器将接管下面的操作 地面转向高度 在此高度以下和滚出过程中保持载具罗盘航向。参见 调整平面的地面转向 了解详情。
改进着陆¶
良好着陆的关键在于(飞行)控制器知道离地面有多远。在默认设置下,唯一可用来检测高度的传感器是气压计。遗憾的是,气压计主要有三种误差:
气压变化引起的气压漂移
(飞行)控制器电子设备温度变化导致的气压漂移
由于气压计周围气流造成的局部气压变化而产生的气压误差
要实现良好的自动着陆,理想的设置是有一个 激光雷达.激光雷达可以非常精确地测量与地面的距离,而且不会受到漂移的影响。如果您安装了激光雷达,可以通过以下方式将其用于着陆 RNGFND_LANDING = 1.
如果没有安装激光雷达,您可以采取一些措施,尽量减少自动着陆时的气压误差问题
在电子设备预热后进行气压计校准。最简单的方法是使用方向舵撤膛、上膛/撤膛开关或安全开关解除飞机上膛。解除警报后,飞机将假定已着陆,并将气压计归零至当前气压。它还将重置 HOME 位置和高度。
尽量避免气流直接进入(飞行)控制器,以免造成与速度相关的压力变化
缩短飞行时间,减少气压变化的时间。检查您的日志,看看是否一直在零高度降落
另外,您也可以使用高精度 GPS 作为高度源,而不是气压计。参见
对于腹部着陆的飞机,以较小的俯仰角进行着陆也很有效(见图 5)。 LAND_PITCH_DEG),并设定一个稍高的飞行高度来进行扩充。只有当你的失速速度足够低,滑翔一段时间才会可靠。