ESP8266 无线遥测技术¶
ESP8266 wifi 模块是一种廉价的可编程 wifi 模块,可从多种渠道获得。大多数 Pixracers.
购买地点¶
"这款" adafruit HUZZAH ESP8266 分线板 之所以推荐使用该电路,是因为它可以连接到(飞行)控制器,而无需 3.3V 稳压器或电平转换器。
连接(飞行)控制器¶
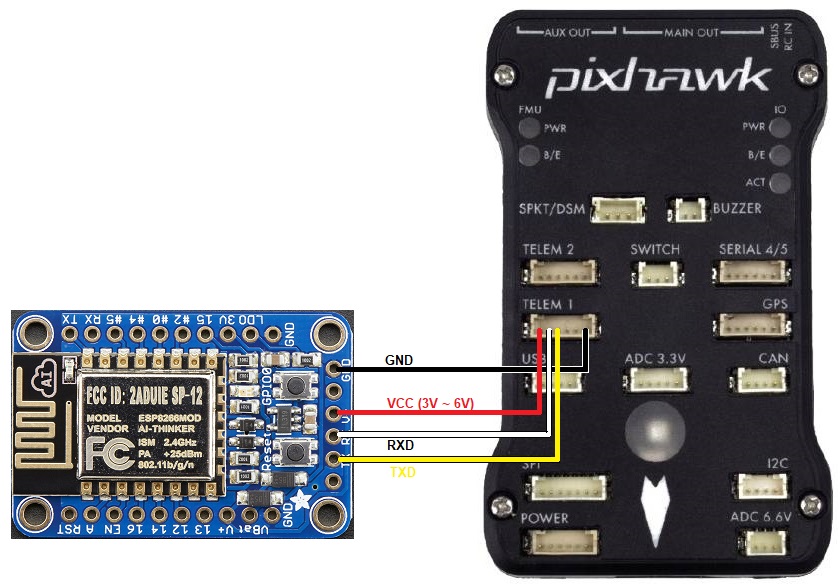
如果连接到串行 1/Telem1,则应在(飞行)控制器上设置这些参数(如果使用其他遥测端口,则应将参数名称中的 "1 "替换为遥测端口的编号):
serial1_protocol = 2(MAVLink2)或 1(MAVLink1)
SERIAL1_BAUD = 921(921600 波特)
如果在连接时遇到问题,设置 brd_ser1_rtscts = 0 表示禁用流量控制,但通常没有必要这样做
从地面站连接¶
将 MAVESP8266 固件加载到设备(如果尚未加载)(见下文
在电脑上打开 WIFI 网络连接屏幕,选择 WIFI 接入点(SSID 为 "ArduPilot "或 "PixRacer",密码分别为小写字母 "ardupilot "或 "pixracer")。
在地面站上,将连接类型设为 UDP,然后按 "连接"。
如果一切正常,地面站将连接并下载参数,HUD 将随着载具的移动而移动。
用 MAVESP8266 固件刷新设备¶
我们建议闪存 ArduPilot 专用版本的 MAVESP8266 (二进制, 源代码)比原来的 MAVESP8266 因为它包含两个附加功能:
支持 mavlink2
后续固件上传可通过无线网络完成
简单配置的网络界面
一个 像 SparkFun 提供的这种 FTDI 电缆 至少在第一次将固件上传到设备时需要这样做。
如果您使用的是 Adafruit HUZZAH ESP8266 板,并且是通过 Windows PC 闪存,那么您应该这样做:
在电路板的窄端焊接一个 6 针针座,其中有 TX、RX、VCC 和 GND 引脚
使用 FTDI 电缆将设备连接到计算机
同时按下复位和 GPIO0 按钮,使设备进入引导加载程序模式,然后松开复位按钮和 GPIO0 按钮。
从以下网址下载 MAVESP8266 的 ArduPilot 专用版本 本目录
firmware-esp01_1m.bin 适用于闪存容量为 1MB 的电路板(大多数电路板)。
firmware-esp01.bin 适用于只有 512KB 闪存的电路板(非常老的电路板)
firmware-esp12e.bin 适用于配备 4MB 闪存的电路板
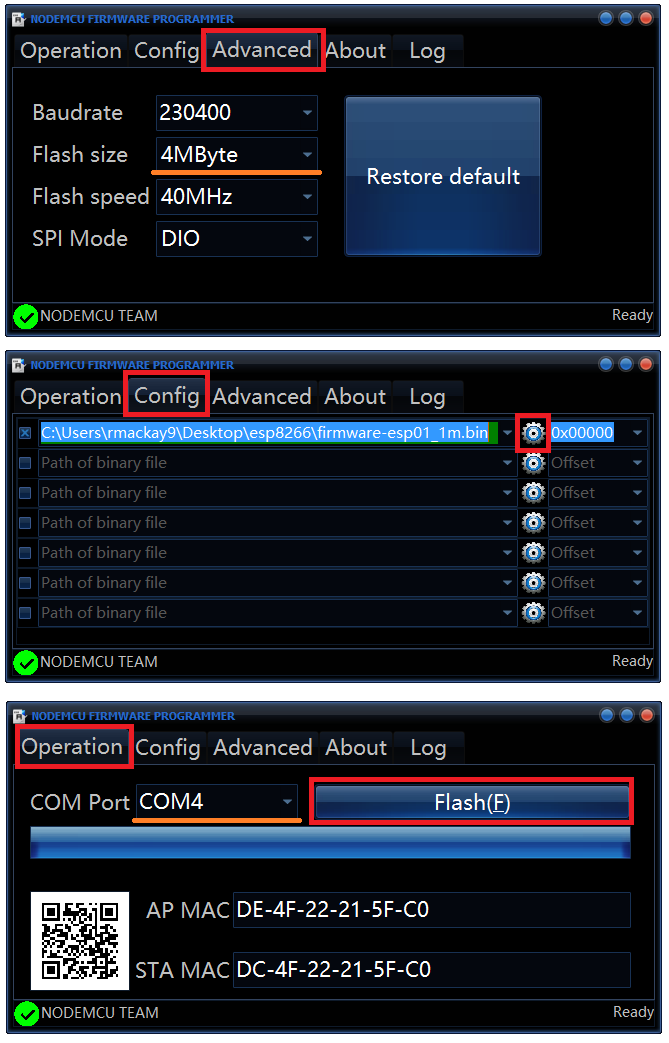
Windows 用户应下载并运行 NodeMCU 安装程序 (64 位 或 32 位)
在高级页面上确保闪存大小设置为 4MByte
在配置页面按齿轮,选择上面下载的固件
在操作页面上选择 "COM 端口 "并按下 "闪烁 "按钮。如果成功,蓝色条将从左到右缓慢拉伸,左下方的图标将变为绿色。
Mac 用户应使用 esptool
首先,在终端中使用以下命令行查找所连接设备的 COM。连接 ESP8266 的 USB COM 端口将显示为"/dev/ttyusbserial-A600eto2"。
$ ls /dev/tty\.*
接下来,您需要清除 ESP8266 中的所有内容。将 ESP8266 置于引导加载器模式,然后在终端窗口中运行此命令,将"... "替换为"..."。 COM 使用您在上面找到的 ESP8266 COM 端口
$ esptool.py -波特 921600 --端口 COM 擦除闪存
最后,用正确的预期固件闪存电路板:再次将设备调至引导加载器模式,然后使用以下命令,再次替换 COM 中使用的端口。
$ esptool.py -波特 921600 --端口 COM 写入闪存 --闪存模式 天文台 --闪存大小 侦测 0x0 firmware-XXXX.bin
Linux 用户应使用 esptool
更改 Wifi SSID 和密码¶
从电脑连接到无线接入点(初始接入点 ID 为 "ArduPilot",密码为 "ardupilot")。
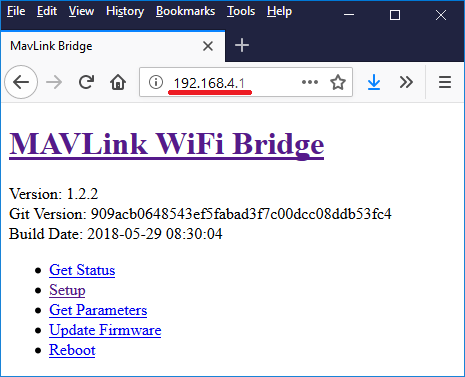
打开浏览器 192.168.4.1 然后会出现一个简单的网络界面,如下所示
点击 "设置 "链接
设置 "AP SSID "和 "AP 密码 "字段(都必须在 8 到 16 个字符之间),按下 "保存 "按钮并重新启动设备
感谢 雷的博客 这也是本页部分建议的来源。