Gremsy Mio、Pixy、S1、T3、T7 和 ZIO 3 轴万向节¶
Gremsy Mio, Pixy F, Pixy U, Pixy WP, S1, T3, T7 和 ZIO 三轴万向节可使用 MAVLink 协议与(飞行)控制器通信,并与一系列用于实时视频或制图的相机兼容。

警告
MIO 云台无法与 ArduPilot 通信。我们希望 Gremsy 软件 7.7.3 版能修复这一问题。
T3V3 云台必须运行 7.7.3-预览版(或更高版本)。
PixyU 云台必须运行 7.7.1 或 7.7.2。7.7.3 版无法正常工作。我们希望能在 Gremsy 7.7.4(或更高)版本中得到修复。
不支持 PixyWE 云台。
ZIO 云台不能用作辅助支架(例如,下面的 "连接两个云台 "不适用于 ZIO)。
购买地点¶
这些万向节可以从 Gremsy 商店
连接(飞行)控制器(4.3 或更高版本)¶
如果使用 ArduPilot 4.3(或更高版本),请按照以下说明进行设置
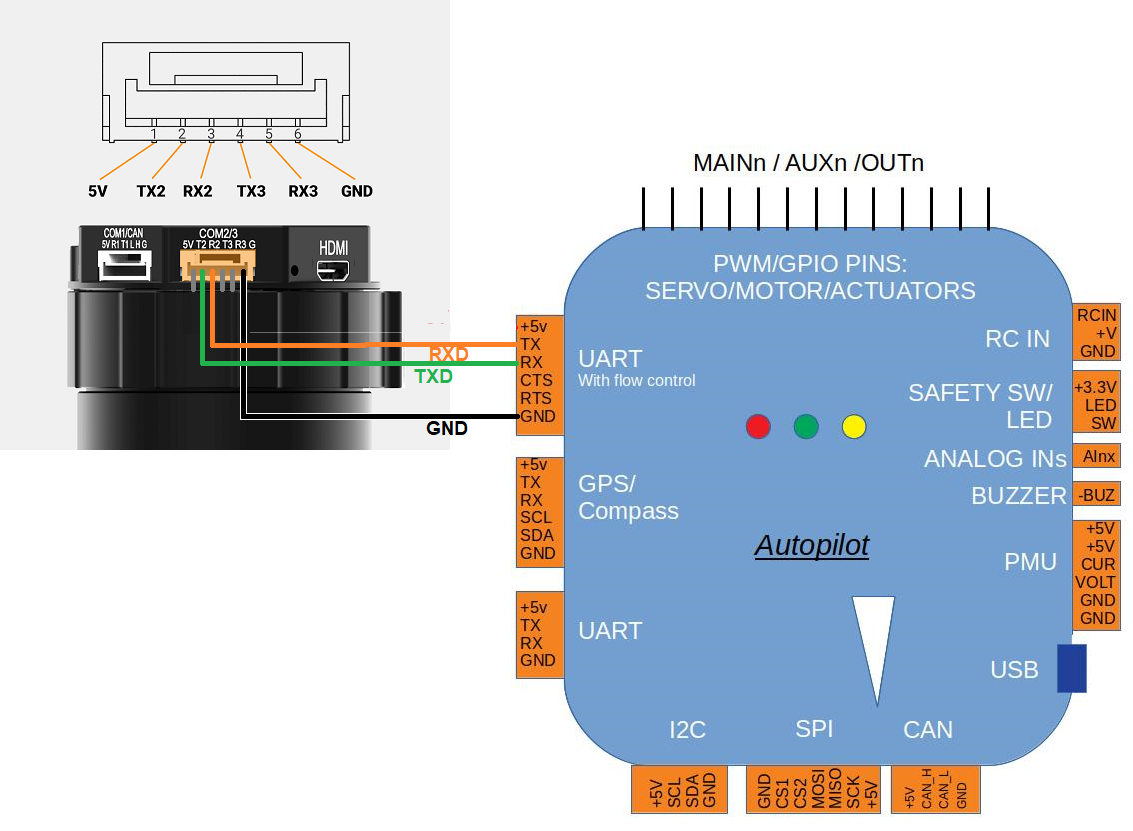
如上图所示,将万向节的 COM2 端口连接到(飞行)控制器的一个串行/遥测端口(如 Telem2)。
使用地面站连接(飞行)控制器,并设置以下参数(如果使用第一个支架):
MNT1_TYPE 将 "Gremsy "调至 "6 "并重新启动(飞行)控制器
如果使用带有 ArduPilot-4.5.0 (或更高版本)的 ZIO,则设置为 CAM1_TYPE 调至 "6"(MAVLinkCamV2)并重新启动(飞行)控制器
SERIAL2_BAUD 改为 "115 "表示 115200 bps。根据物理连接情况,"SERIAL2 "可用另一个串行端口(即 SERIAL1)代替
serial2_protocol 至 2 表示 "MAVLink2"
serial2_options 将 1024改为 "不将 mavlink 转发到/从"
请参阅本章的 "使用遥控发射机控制 "部分。 本页 了解通过遥控发射机控制云台(又称 "遥控瞄准")所需参数更改的详情
(飞行)控制器成功连接云台后,"Mount:GREMSY PixyU fw:7.7.1.0"(或类似信息)将发送至地面站。寻找这条信息可能有助于确定(飞行)控制器和云台是否成功通信。
配置云台¶
下载并安装 gTune 桌面
使用 USB 电缆将云台连接到台式电脑,并打开云台电源
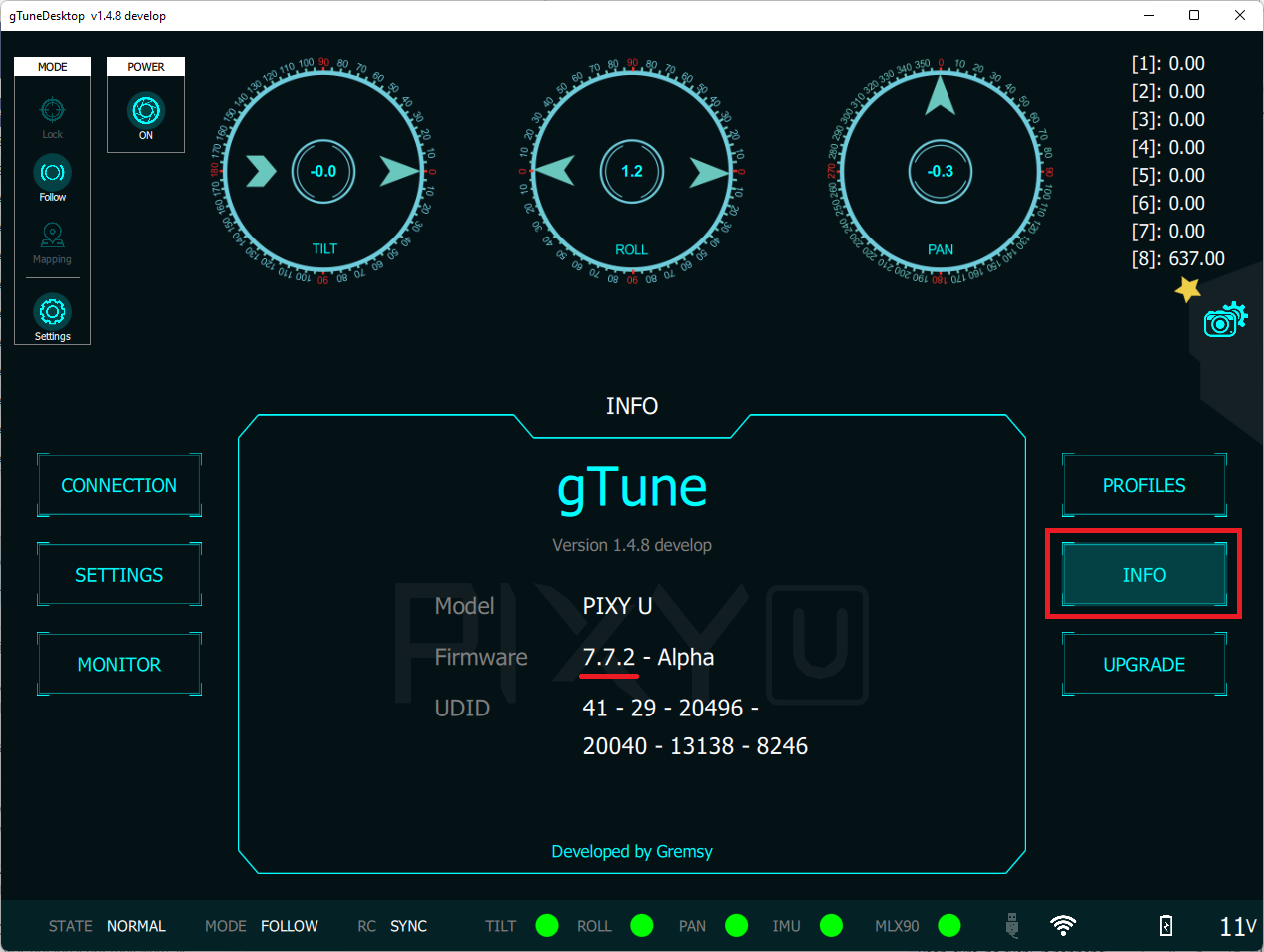
使用 gTune Desktop 检查云台固件版本
打开 gTune Desktop 应用程序,应显示 "找到您的设备
选择 "连接
选择 "INFO "并确认云台运行的固件为 "7.7.1 "或更高版本
如果云台固件的版本早于 7.7.1,请下载最新的 .hex 文件。 Mio, Pixy F, Pixy U, Pixy WP, S1, T3, T7 或 ZIO
选择 "升级"、"浏览 "并选择上面下载的文件
按下另一个 "UPGRADE(升级)"按钮,升级将在 30 秒内完成。

使用 gTune Desktop 配置云台
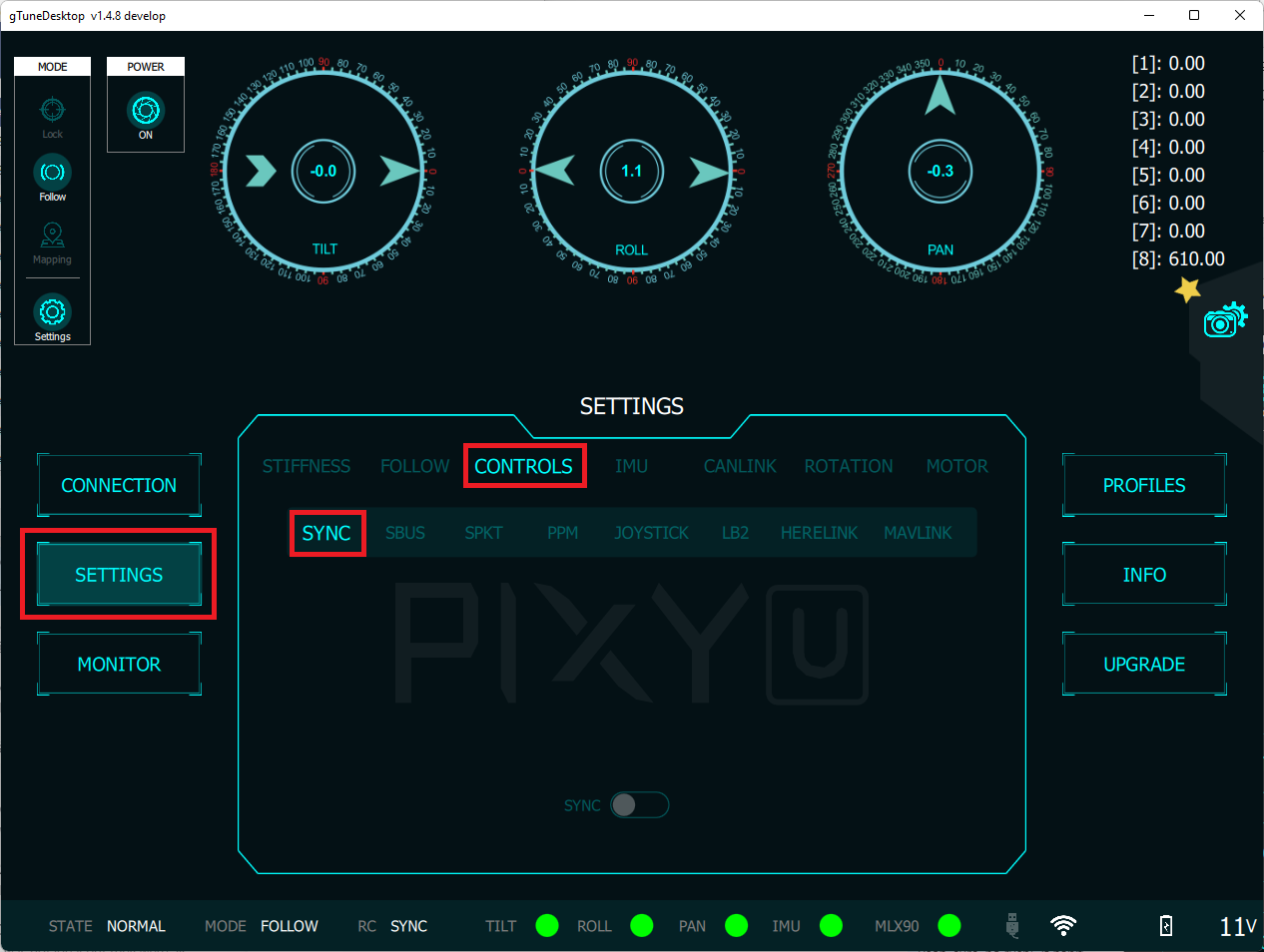
选择 "SETTINGS"(设置)、"CONTROLS"(控制)并确保选择 "SYNC"(同步),以便云台通过 MAVLink 与(飞行)控制器通信。
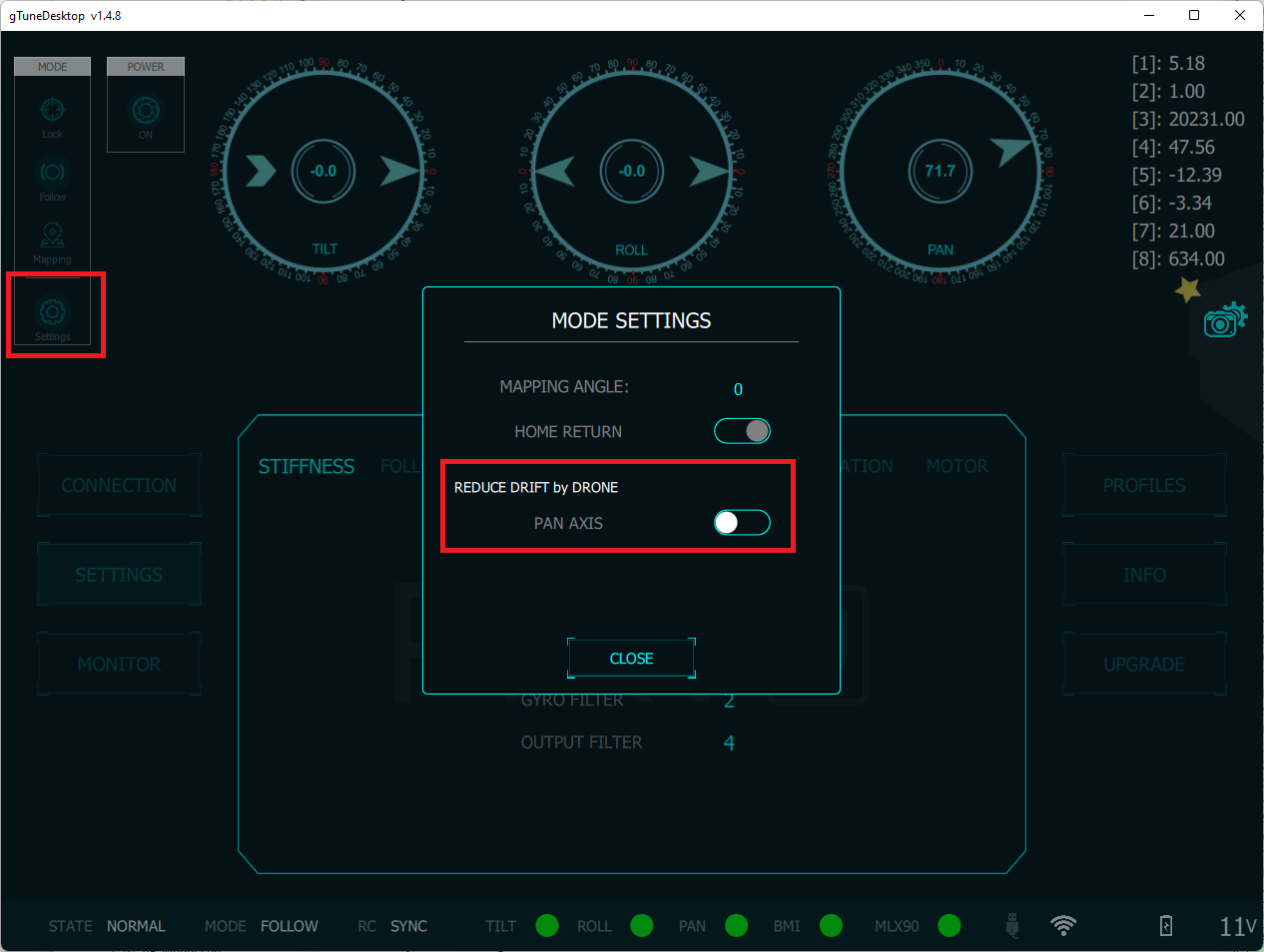
选择 "设置","减少无人机造成的噪音"。
选择 "STIFFNESS"(刚性)选项卡,调整俯仰、滚动和摇摄增益,使云台在不晃动的情况下固定相机位置。
控制和测试¶
参见 云台/支架控制 了解如何使用遥控、GCS 或自动模式任务指令控制云台的详情
连接两个云台¶
如果使用两个 Gremsy 云台,可将每个云台直接连接到(飞行)控制器的一个串行端口,或者将它们菊花链连接起来,只将其中一个连接到(飞行)控制器的一个串行端口。
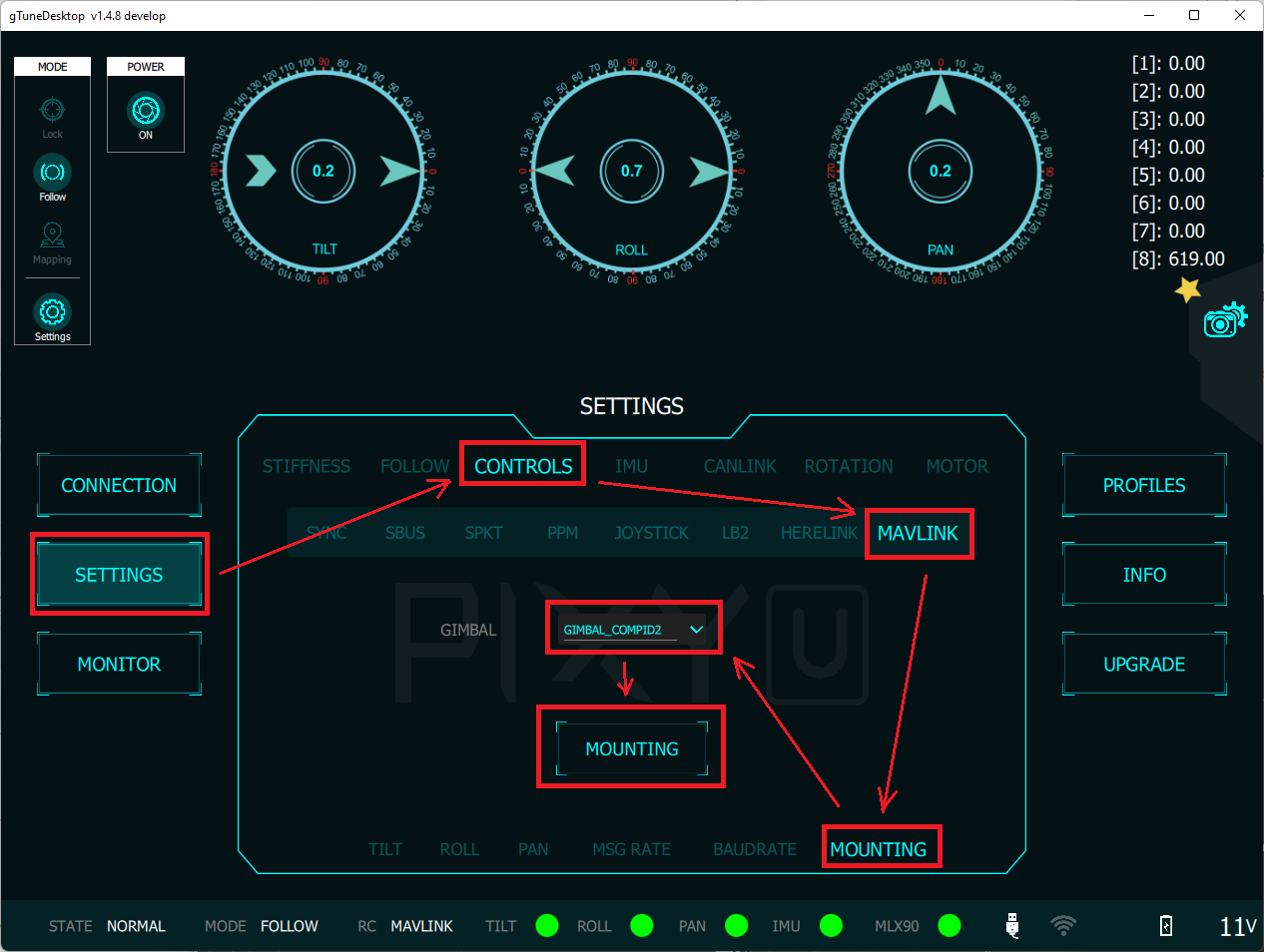
使用 gTune 桌面应用程序将第二个万向节的 MAVLink 组件 ID 设置为 "GIMBAL_COMPID2"。
将 GCS 连接到(飞行)控制器并设置
MNT2_TYPE 将 "Gremsy "调至 "6 "并重新启动(飞行)控制器
如上所述,设置相应的 SERIALx_BAUD、SERIALx_PROTOCOL 和 SERIALx_OPTIONS 参数
连接(飞行)控制器(4.2 或更早版本)¶
我们建议将 Gimbals 的 COM2 端口连接到(飞行)控制器的一个串行/遥测端口,如上图所示的 Telem2。
连接地面站并设置以下参数(如果使用第一个支架):
MNT1_TYPE 将 "SToRM32 MavLink "设为 "4",然后重启(飞行)控制器
SERIAL2_BAUD 改为 "115 "表示 115200 bps。根据物理连接情况,"SERIAL2 "可用另一个串行端口(即 SERIAL1)代替
serial2_protocol 至 2 表示 "MAVLink2"
SR2_EXTRA1 至 10
SR2_POSITION 至 10
云台的最大角度可以通过这些参数设置(如图所示为第一个卡口):
MNT1_ROLL_MIN 至 -30,允许左倾达 30 度
MNT1_ROLL_MAX 至 30 度,允许右倾至 30 度
MNT1_PITCH_MIN 调至 -90,以便指向下方 90 度
MNT1_PITCH_MAX 到 30,以便指向上方 30 度
MNT1_YAW_MIN 到 -180,以便向左转弯
MNT1_YAW_MAX 至 180,以便向右转弯
要通过发射机控制万向节的倾斜角度,可使用以下方法为滚动、俯仰或偏航设置遥控控制器 RCx_OPTION 212(Mount1 Roll)、213(Mount1 Pitch)、214(Mount1 Yaw)分别表示第一个安装点,或 215-217 表示第二个安装点。
下面是 Gremsy 的说明: