云台/支架控制¶
相机云台(又称相机支架)至少有六种不同的控制方式。本页概述了这些控制方式及其设置。
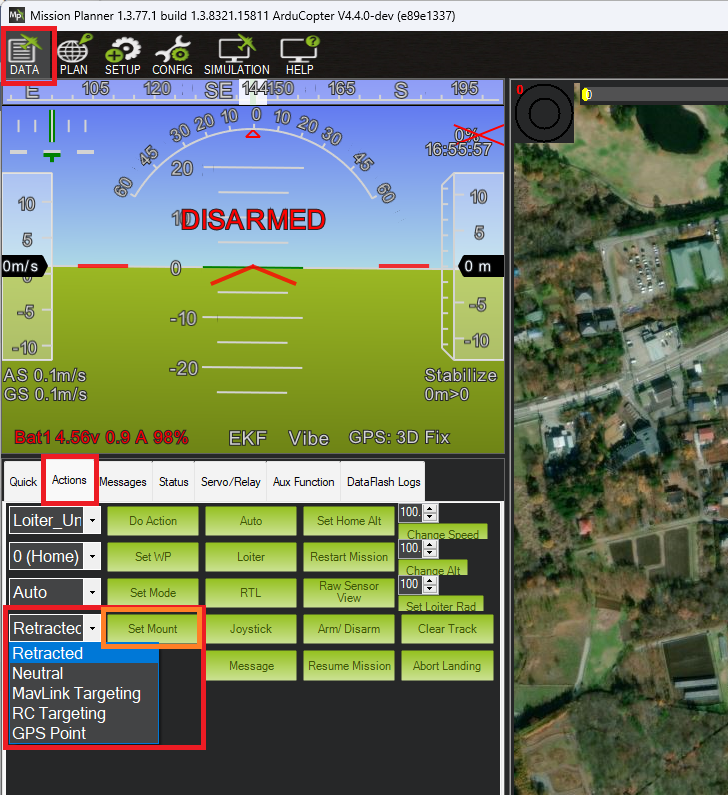
云台的 "模式 "决定了它的控制方式。每个地面站(GCS)都不尽相同,但以Mission Planner地面站为例,它有一个 "设置安装 "按钮,可以更改模式。在许多情况下,用户无需直接设置模式,而是在响应用户命令时自动完成。
以下是支持的 6 种模式。
缩回模式:万向节将移动到在 "缩回 "模式下保持的滚动角、俯仰角和偏航角。 MNT1_RETRACT_X, MNT1_RETRACT_Y, MNT1_RETRACT_Z 参数。一些特殊的万向节行为:
Gremsy 云台 将立即停止稳定
伺服万向节 将移动到指定角度并停止稳定。如果设置了缩回伺服器(例如 servo10_function = 9(Mount1Retract))该伺服器将移动到最小位置
Siyi 云台 不提供滚动控制,因此滚动角 (MNT1_RETRACT_X) 被忽略
中性模式:万向节将移动到在 "中性 "模式下保持的滚动角、俯仰角和偏航角。 MNT1_NEUTRAL_X, MNT1_NEUTRAL_Y, MNT1_NEUTRAL_Z 九十
MAVLink 定位:云台将根据从地面站、配套计算机或其他 MAVLink 命令源接收到的实时命令和/或自动模式任务命令进行移动
遥控瞄准:飞行员使用遥控发射器实时控制云台
GPS 点:与 MAVLink 定位相同,但云台指向特定位置。用户无需主动将云台设置为该模式
SysId Target(系统 ID 目标):云台指向指定 MAVLink 系统 ID 的另一辆车。用户无需主动将云台设置为该模式,目前也没有已知的支持设置系统 ID 的 GCS,但可以通过更新以下值来设置该参数 MNT1_SYSID_DFLT<MNT1_SYSID_DFLT>; 直接。
原点:万向节指向原点(通常为起飞位置)
万向节启动时的默认模式可以使用 mnt1_deflt_mode 参数。
备注
(在所有模式下(固件版本 4.5 及更高版本),除 RETRACT 模式外,如果飞行员移动任何已配置的滚转/前平移/俯仰/偏航/航向 RC 目标定位输入(见下文)大于其滚转/前平移/俯仰/偏航/航向 RC 目标定位输入(见下文),则会出现以下情况 RCx_DZ 或 10uS(如果该参数小于 10uS),则会自动切换到 RC_Targeting 模式。
使用遥控发射器进行控制(又称遥控瞄准)¶
当云台处于 "遥控瞄准 "模式时(请参阅上文了解如何更改模式),飞行员可以使用每个轴的遥控发射器通道来控制云台的目标滚动、俯仰和偏航角度。例如
设置 RC6_OPTION = 212("Mount1 Roll")通过 RC 通道 6 控制云台的滚动角度
设置 RC7_OPTION = 213("Mount1 Pitch")通过 RC 通道 7 控制万向节的俯仰角度
设置 RC8_OPTION = 214("Mount1 Yaw")通过 RC 通道 8 控制万向节的偏航角度
确保所用每个 RC 输入通道的 RCx_TRIM 参数处于 RCx_MIN 和 RCx_MAX 之间的中间位置
默认情况下,RC 输入指定 观点 但可以改为 费率 通过设置 MNT1_RC_RATE 到所需的旋转速率(度/秒)。
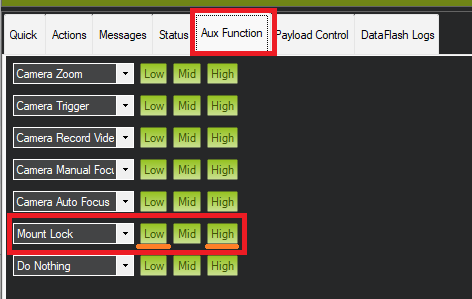
默认情况下,偏航控制处于 "跟随 "模式(又称 "车身框架"),这意味着万向节的航向将随着飞行器的旋转而旋转。另一种模式是 "锁定 "模式(又称 "地面框架"),即无论飞行器如何偏航,万向节的航向都将锁定在一个特定的航向上。飞行员可以通过辅助开关在这两种模式之间进行切换。
设置 RC9_OPTION = 163("安装锁定"),通过遥控通道 9 在 "锁定 "和 "跟随 "模式之间切换
飞行员可使用 "缩回安装1 "辅助开关缩回云台
RC10_OPTION = 27("缩回安装1"),将云台切换到缩回模式
从地面站或配套计算机进行控制(又称 MAVLink 目标定位)¶
地面站可以发送 MAVLink 命令来控制云台。虽然每个 GCS 的界面各不相同,但以下是Mission Planner地面站提供的控制功能。
万向节的角度控制方式如下
使用 "数据 "屏幕 "操作 "选项卡左下角的下拉菜单将模式设置为 "MAVLink Targeting",然后按下 "设置安装 "按钮(见上图)。
使用 "有效载荷控制 "选项卡调整云台的滚动、俯仰或偏航角度

使用辅助功能选项卡在 "跟随 "和 "锁定 "模式之间切换偏航
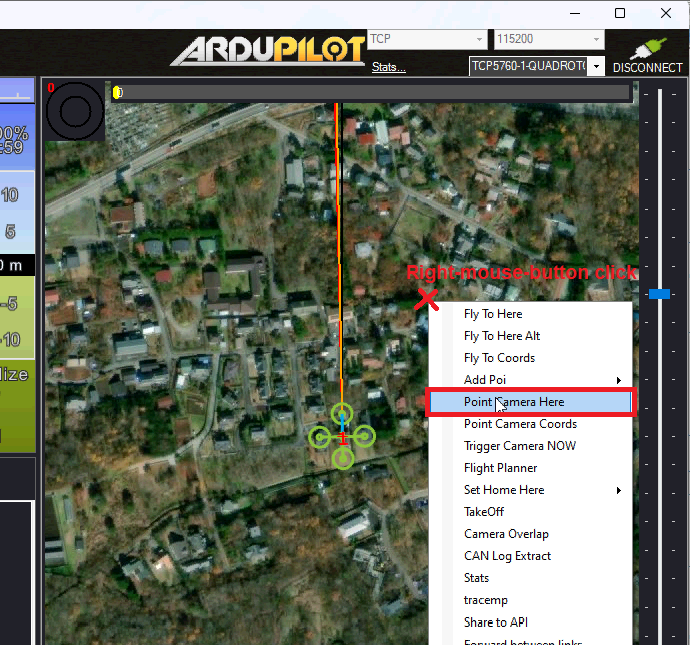
要将云台指向特定位置(如纬度、经度、海拔高度),请在 "数据 "屏幕上用鼠标右键单击地图,选择 "将摄像机指向此处",然后输入高于原点的高度。
MAVLink 挂载命令可从其他来源(如配套计算机)发送。参见 控制云台/相机支架 获取命令列表和更多信息。
也可通过配套计算机或其他来源的 MAVLink 命令控制摄像机。参见 控制摄像机 文件。
自动模式任务期间的控制¶
控制云台的命令列于 自动任务中的相机控制, 旋翼飞行器任务指令列表 和 任务指令 页面