存档:将 ChibiOS 固件加载到 Pixhawk 上¶
这些说明介绍了如何下载并将带有 ChibiOS 固件的测试版 ArduPilot 安装到 pixhawk (飞行)控制器上。
在测试中,开发团队发现使用 ChibiOS(代替 NuttX)可以使固件体积更小,循环速率更快,定时抖动更小。ChibiOS 版本的测试较少,只有少数几项测试。 缺少的功能 然而
在 ChibiOS 和 NuttX 固件之间切换时,参数将被保留,无需重新调整载具。
下载测试版固件¶
从以下网址下载相应的测试版固件 firmware.ardupilot.org 使用下面的链接,并将生成的 .apj 文件保存在电脑中的某个位置:
作为定制固件上传¶
使用 USB 电缆将地面站 PC 与(飞行)控制器连接起来
选择电路板的 COM 端口和波特率(通常为 115200)。如果使用Mission Planner地面站,则在屏幕右上方选择。操作 不 按下连接按钮
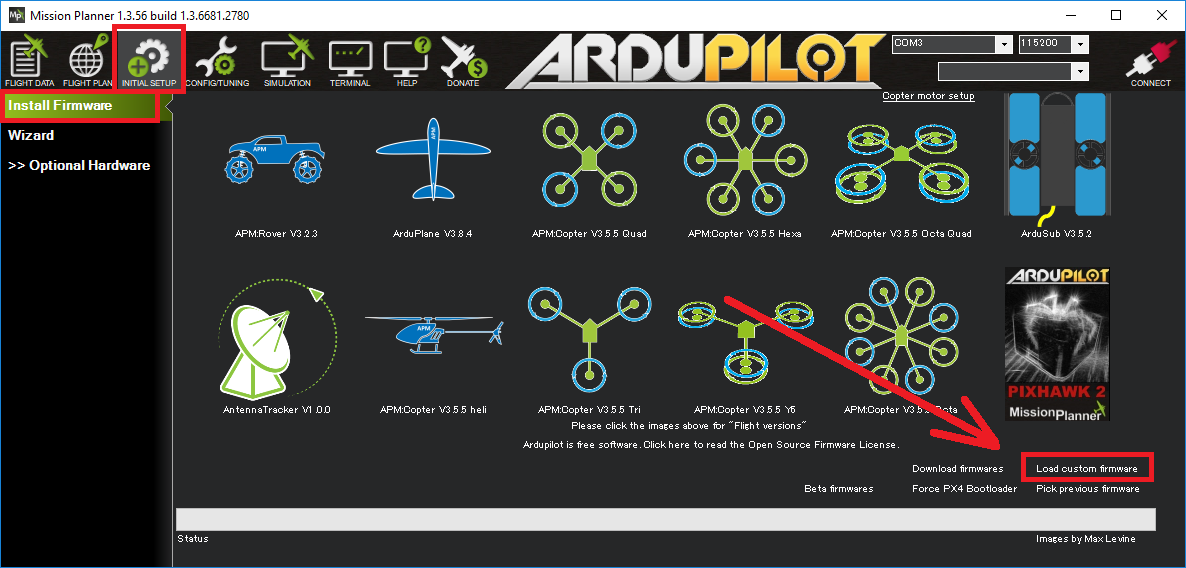
进入 GCS 的固件安装屏幕。如果使用Mission Planner地面站,则选择 "初始设置>>安装固件"。
点击 "加载自定义固件 "链接并选择上面下载的 .apj 文件。如果使用Mission Planner地面站而 "加载自定义固件 "链接不可见,请选择 "配置/调整 >>计划器 "并将 "布局 "下拉菜单设为 "高级"。
按照显示的任何有关插拔电路板的说明进行操作
如果一切顺利,屏幕下方应显示一些状态,如 "擦除..."、"编程..."、"验证... "和 "上传完成"。
测试¶
打开地面站的飞行数据屏幕
选择 COM 端口(与 NuttX 版本相比有所改变)和波特(通常为 115200)
按下 连接 按钮
下载参数后,当您倾斜电路板时,HUD 应该会更新
有关将 GCS 连接到(飞行)控制器的更多详情,请参阅下文。 这里.