存档:APM 2.5 和 2.6 概述¶
警告
与 ArduPilot 一起使用的 APM2.x 已经报废。本文供现有用户使用。
APM 2.5¶
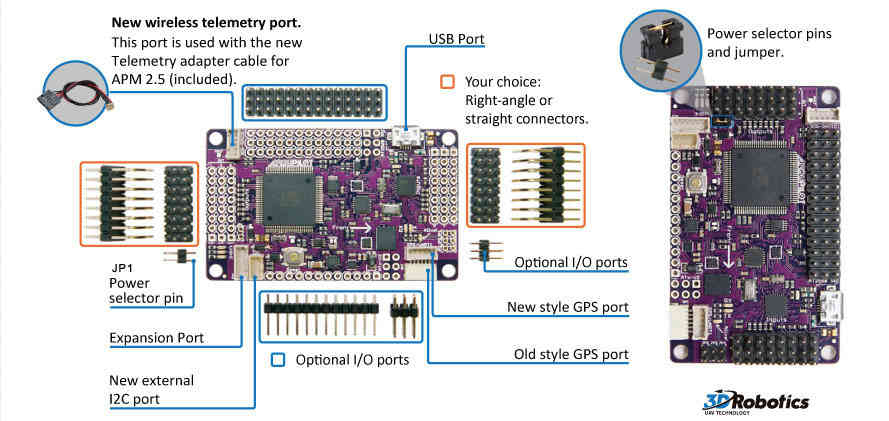
APM 2.5 电路板无需组装,可直接安装固件。您可以选择侧面或顶部输入引脚配置,以适应各种安装方式。订购时您将看到该选项。
本页将为您介绍这款电路板的设计细节。
APM 2.5 与 APM 2.0 相比有一些改进,但两者的布局和功能非常相似。
APM 2.6¶
APM 2.6 是使用外部罗盘的 APM 的修订版。
APM 2.6 没有板载指南针,专为载具优化设计,指南针应尽可能远离电源和电机源,以避免磁场干扰。
APM 2.6 专用于 3DR GPS uBlox LEA-6 带指南针模块。
GPS/Compass 模块的安装位置可能比 APM 本身离噪声源更远。
APM 2.6 需要一个带有机载指南针的 GPS 设备才能实现完全自主。
有关安装带指南针的 3DR GPS uBlox LEA-6 的信息,请访问 3DR 电源模块.
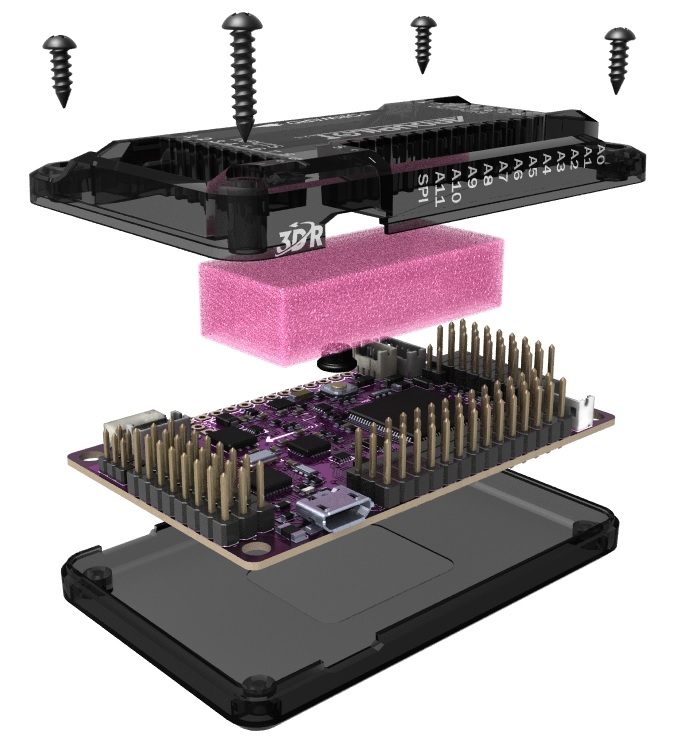
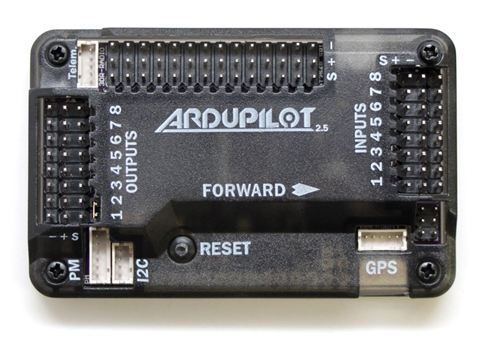
使用 APM 2.5/2.6 机柜¶
如图所示,APM 2.5/2.6 电路板装在一个外壳中,外壳上有泡沫保护气压传感器。
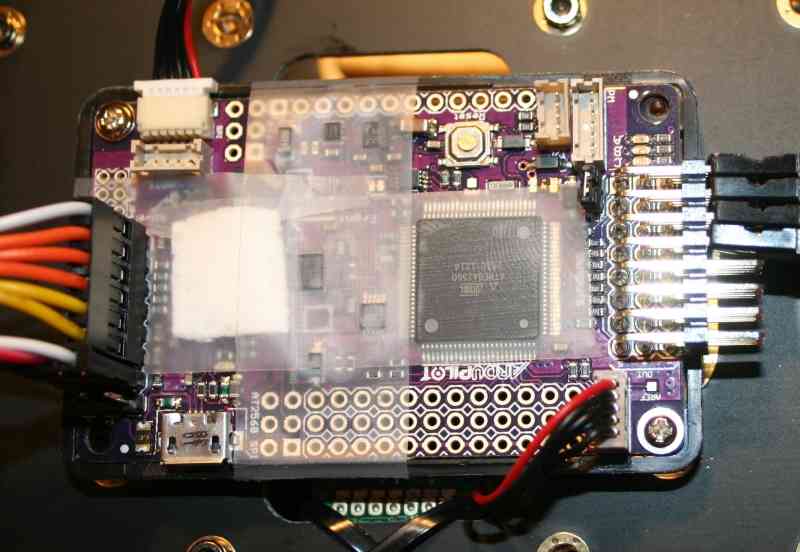
不使用 APM 机箱¶
如果不使用外壳,确保用一些开孔泡沫、棉垫或纸巾盖住气压传感器,使其免受道具冲刷、风和乱流的影响。此外,气压传感器对光线很敏感,从阳光直射到阴暗处,读数会有几米的变化。某种类型的遮光板(在泡沫塑料上)可将光线变化的影响降至最低。
为 APM2 供电¶
为 APM2 供电的最常见方式是使用 3DR 电源模块.
有关为 APM 供电和为伺服电机供电的详细信息,请参阅《为 APM 供电和为伺服电机供电》。 为 APM2 供电.
电路板底部焊接跳线选项说明¶
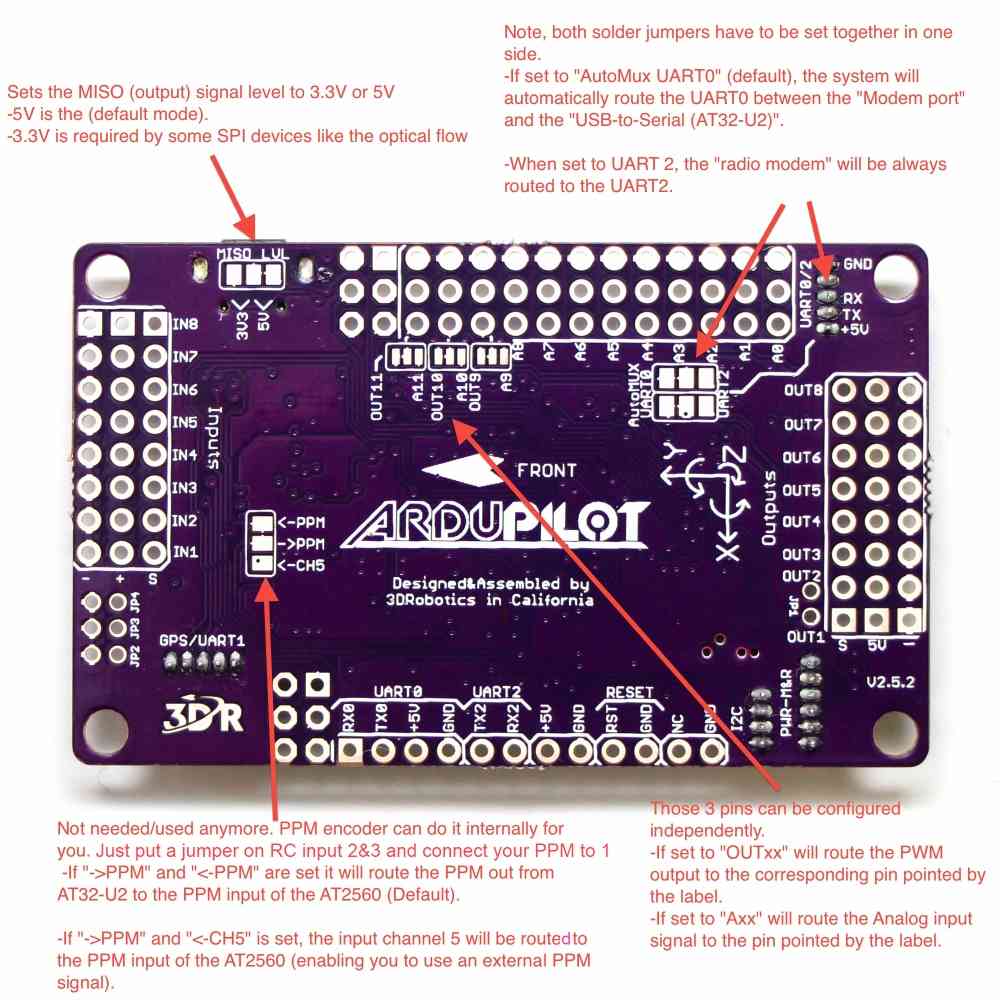
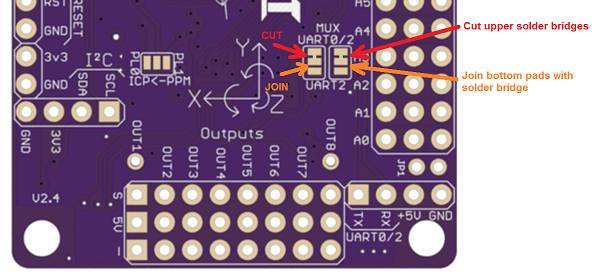
将遥测功能改为使用 UART2(又称串行 3)¶
默认情况下,连接到 APM2 的 Xbee 将使用 UART0(在 Arduino 中又称 "串行"),如上所述,它与 USB 共享。如果希望使用 UART2(又称 "串行 3")进行遥测,可以更改 APM2 底部的 "AutoMUX UART0 "跳线。
虽然很难看到,但默认情况下,上焊盘之间有两个小跳线,必须用 X-Acto 刀片切割。然后必须制作一个新的焊桥来连接底部焊盘。
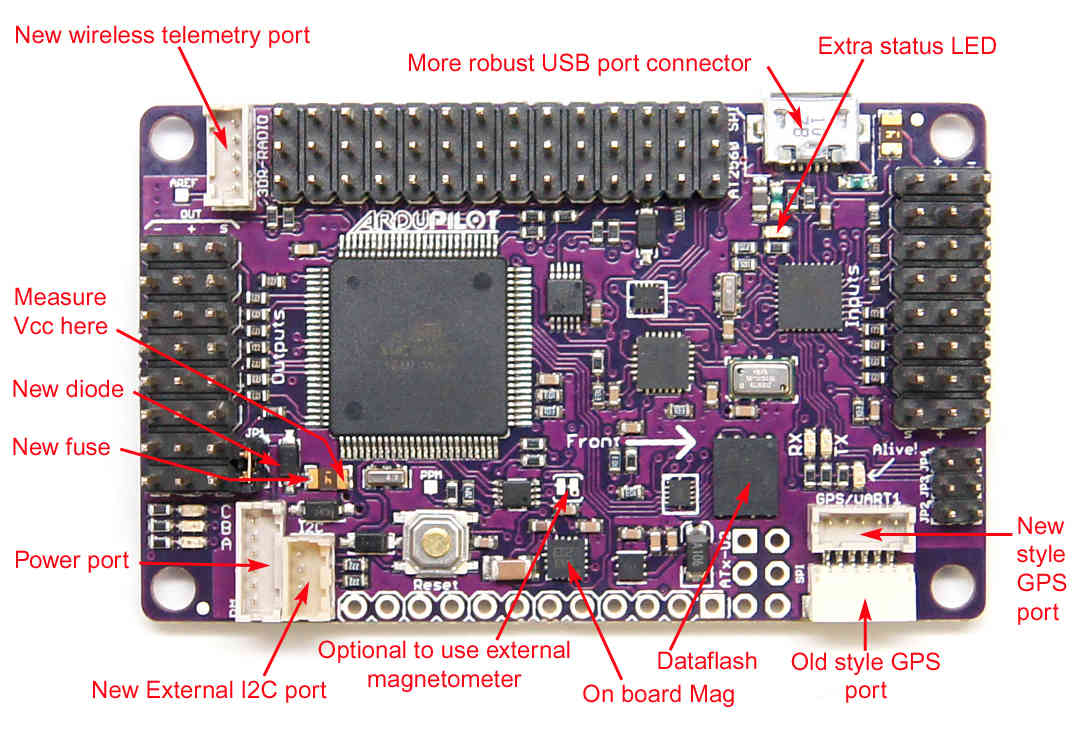
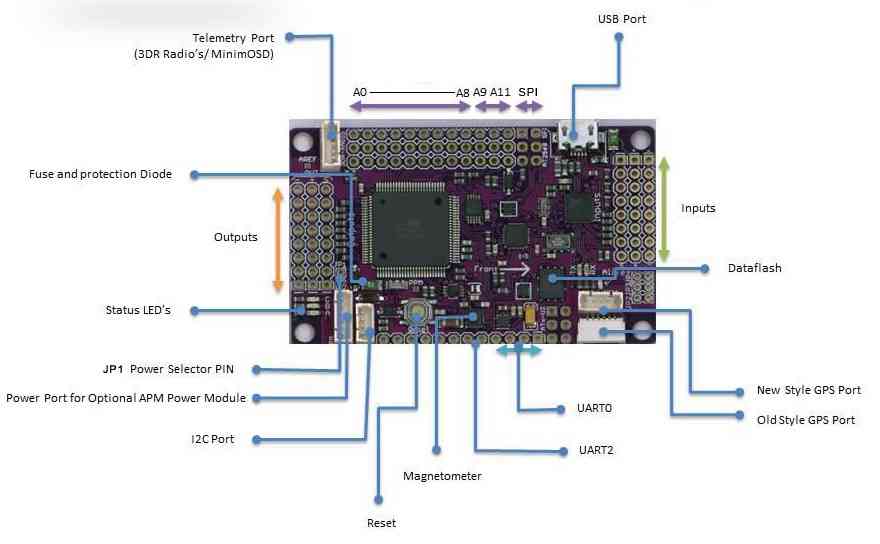
APM 2.5 板功能¶
APM 2.5 电路板组装选项¶
Quadzimodo 在 SketchUp 8 中制作了一个非常漂亮的 APM 2.5 电路板可编辑 3D 模型: `APM 2.5 Google Sketchup File <http://api.ning.com/files/z*snRdi7rtEVMDL6zeTTD678X-*SIqNkeiepEP-wb-0A5OFmvQtg033sq9pqhoTVdRIYs9ti10ygSpGNk-hhNnRNbQd8kV78/APM2.5SketchupFile.zip>`___
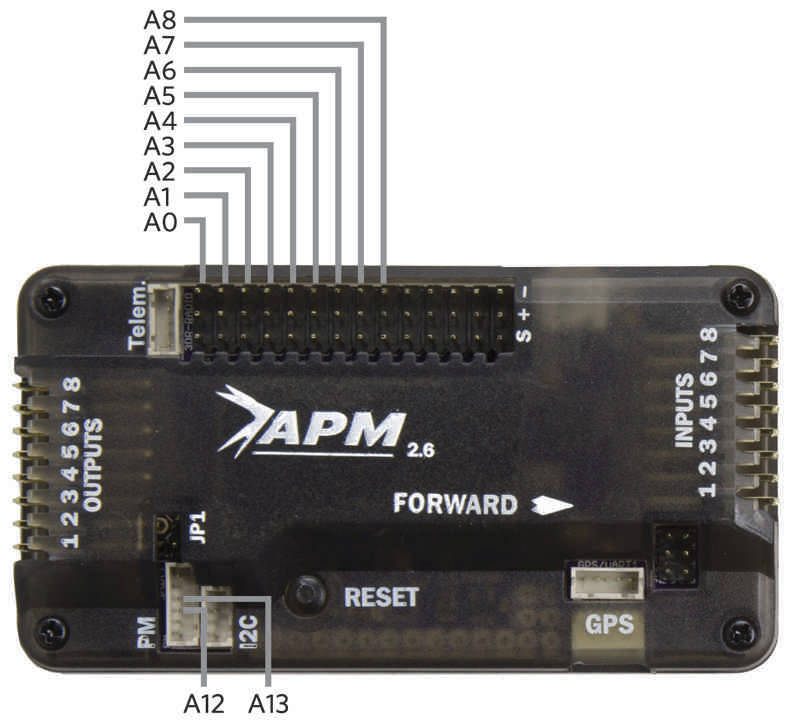
模拟输入引脚¶
引脚 0 至 8:APM2 的一侧有一排模拟输入引脚,在电路板底部标为 A0 至 A8。在 PIN 变量中,这些引脚的编号为 0 至 8(含 8)。
所有这些引脚的电压最高可达 5V,可用于任何普通模拟输入。它们通常用于空速和声纳输入。
第 12 引脚:电源管理连接器电流引脚,可接受高达 5V 的电压,通常连接到 3DR 电源模块,缩放比例为 17:1。
第 13 引脚:电源管理连接器电压引脚,最高可接受 5V,通常连接到 3DR 电源模块,缩放比例为 10.1:1。
数字输出引脚¶
APM2 使用同一组 9 个模拟输入引脚作为数字输出引脚。当您开始将这些引脚用作数字输出时,它们会自动配置为数字输出引脚。
引脚 54 至 62:要将模拟引脚转换为数字引脚,需要在引脚编号上加上 54。因此,引脚 54 是 A0 连接器上的数字输出引脚。针脚 58 是 A4 等。
这些引脚通常与 RELAY_PIN 至 RELAY_PIN4 参数一起使用,可用于控制相机快门、瓶子下落等。它们还可用作声纳 "停止 "引脚,使您可以使用多个声纳,而不会相互干扰。