存档:不再支持
东芝 CAN 电子调速器¶
东芝 CAN 电调是高端电调,可使用定制的 CAN 协议进行控制和反馈。一些附加规格:
FOC 可使飞行时间延长约 10%,同时比非 FOC 电子调速器更安静
高达 7S 电池(未来版本计划高达 12S),50 安培
最多 12 个电机
快速同步问题恢复时间(100 毫秒至 150 毫秒)
相对较轻
在日本设计和制造
备注
Copter-4.0 (及更高版本)、Plane-3.10 (及更高版本)和 Rover-3.5 (及更高版本)均支持这些电调。
购买地点¶
您可以直接联系以下公司购买这些电子调速器(请将电子邮件地址中的 "AT "替换为"@")。
东芝美国:Alan.Li AT taec.toshiba.com
日本 Hikari Alphax:masaki_nakamura AT h-ax.com
还需要 CAN 分路器电路板,上述视频中使用的电路板由以下公司提供 EAMS 实验室 但这些产品也不容易出售。
连接和配置¶
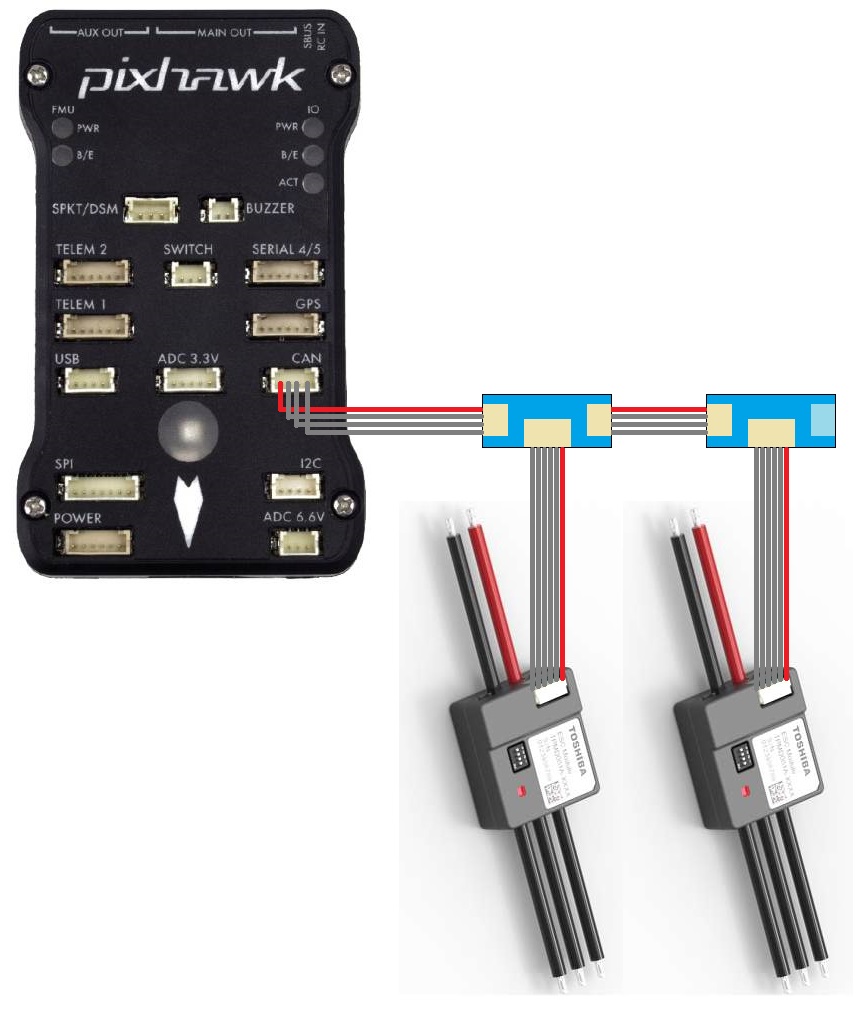
应使用 CAN 分线板将电调串联起来,然后将一根 4 针 CAN 电缆连接到(飞行)控制器的 CAN 端口。请注意,最后一块分线器板的一侧有一个终结器(即没有端口)。
警告
如果使用的是 Cube (飞行)控制器,CAN1 和 CAN2 的标示则相反。这些说明假定电调连接到 CAN1 端口,而 Cube (飞行)控制器上的 CAN1 端口标为 "CAN2"。
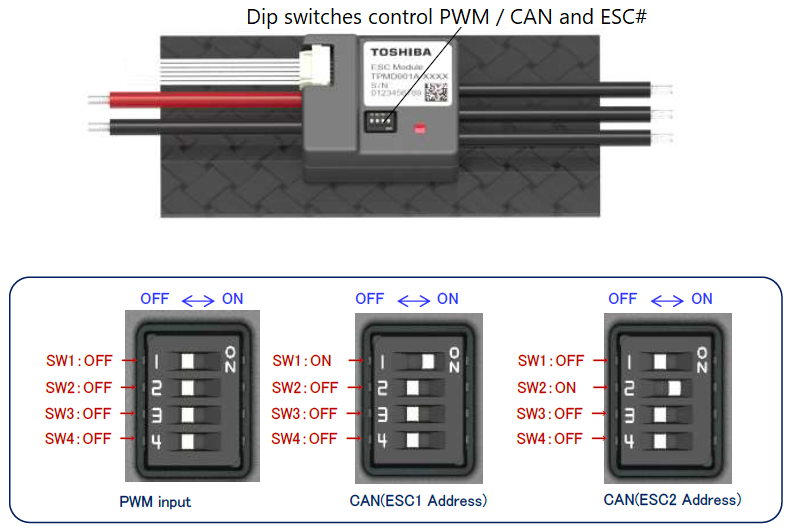
设置每个电调上的拨码开关,指定其唯一编号。该编号还可将电调映射到(飞行)控制器背面的等效 PWM 输出。例如,ESC 1 与连接到(飞行)控制器主输出 1 的普通 PWM ESC 反应相同。默认情况下,该映射也与 电机顺序图.
设置 can_d1_protocol = 3 (ToshibaCAN)
设置 CAN_P1_DRIVER = 1(第一个驱动程序),指定将电调连接至 CAN1 端口
设置
SERVOx_MIN= 1000 和SERVOx_MAX每个连接的电调 = 2000 (x与电调编号相对应),因此 ArduPilot 使用的输出范围与电调的输入范围相匹配
记录和报告¶
东芝 CAN ESC 将信息反馈给(飞行)控制器,这些信息被记录在(飞行)控制器的机载日志 ESCn 信息中,并可在任何应用程序中查看。 兼容 ArduPilot 的日志查看器.这些信息包括
转速
电压
当前
电调温度
当前总数
电机温度(如果连接了选配的电机温度传感器)
RCOU 信息也会被写入机载日志,日志中记录了发送给 ESC 的所需输出水平,数字范围从 1000(表示停止)到 2000(表示全输出)。
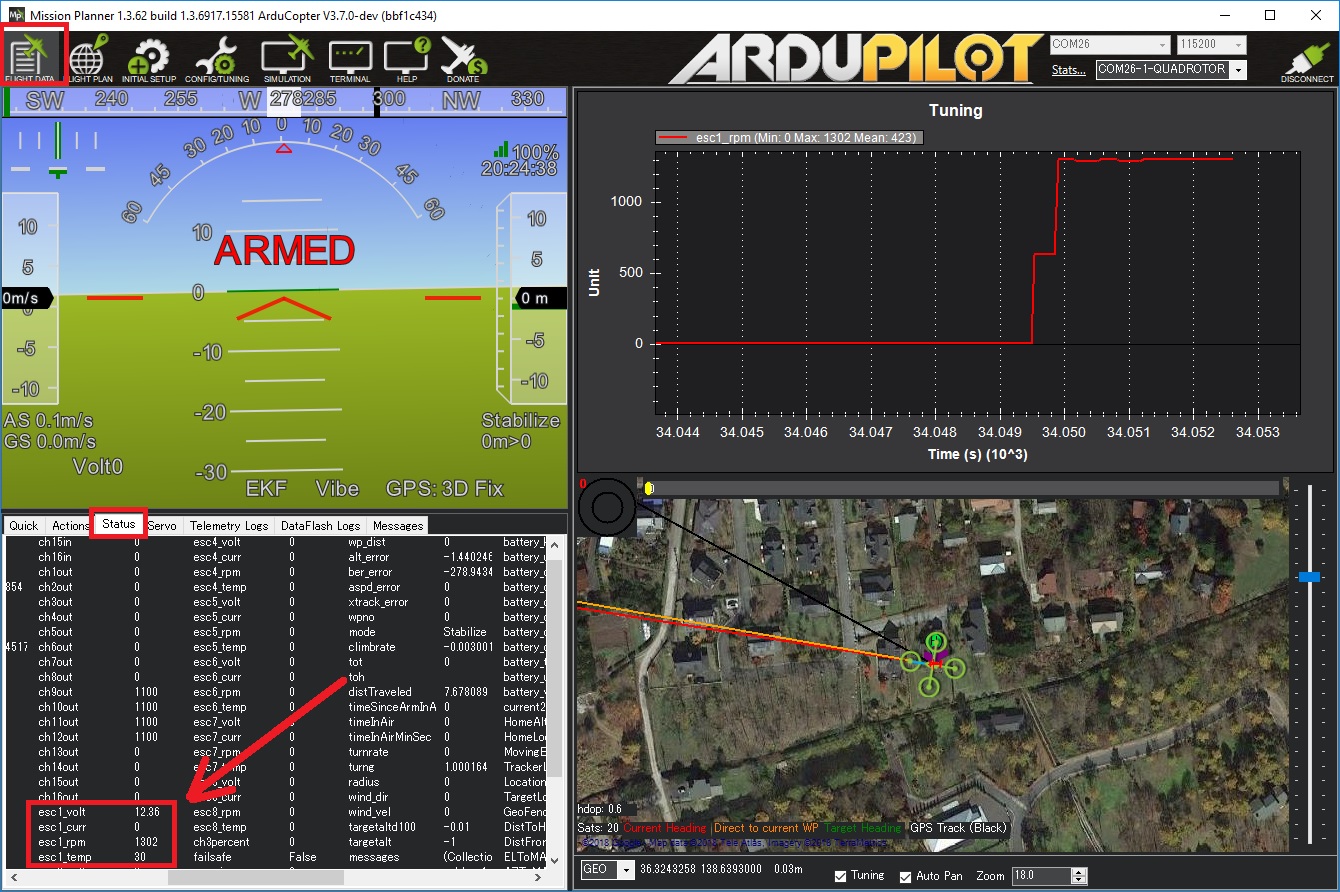
这些信息(马达温度除外)也可以通过地面站实时查看。如果使用Mission Planner地面站,请进入飞行数据屏幕的状态选项卡,查找 esc1_rpm。
备注
向 GCS 发送电调数据需要使用 MAVLink2。请检查相应的 SERIALx_PROTOCOL 参数是否为 2(其中 "x "为用于遥测连接的串行端口号)。