TeraRanger NEO¶

TOF 测距仪的新成员 TeraBee .这种传感器的探测距离更远(最远可达 30 米),在草地等反射率较低的表面上性能更佳,因此非常适合飞机着陆、旋翼飞行器起飞和着陆以及物体规避等应用。
购买地点¶
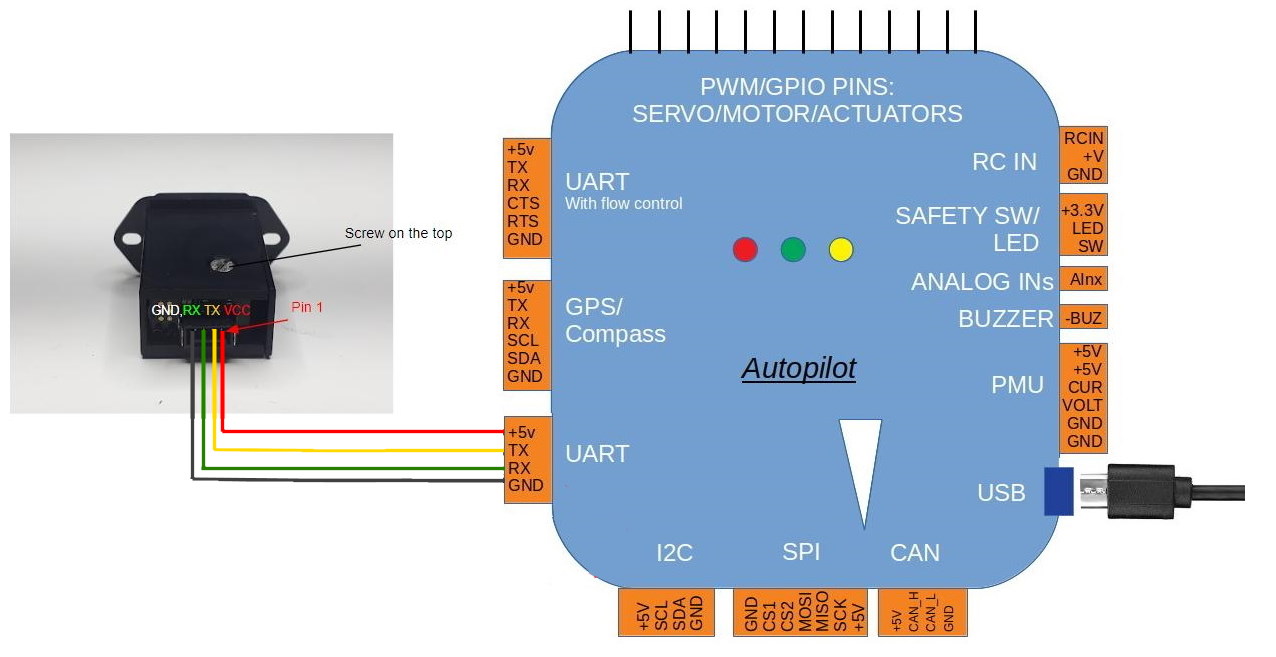
与(飞行)控制器连接¶
传感器可连接到任何(飞行)控制器串行端口。
设置¶
在下面的示例中,我们假设测距仪作为第一个系统测距仪连接到 SERIAL2:
设置 serial2_protocol = 9(测距仪)
设置 SERIAL2_BAUD = 9(9600 波特)
设置 RNGFND1_TYPE = 35 (TeraRanger NEO)
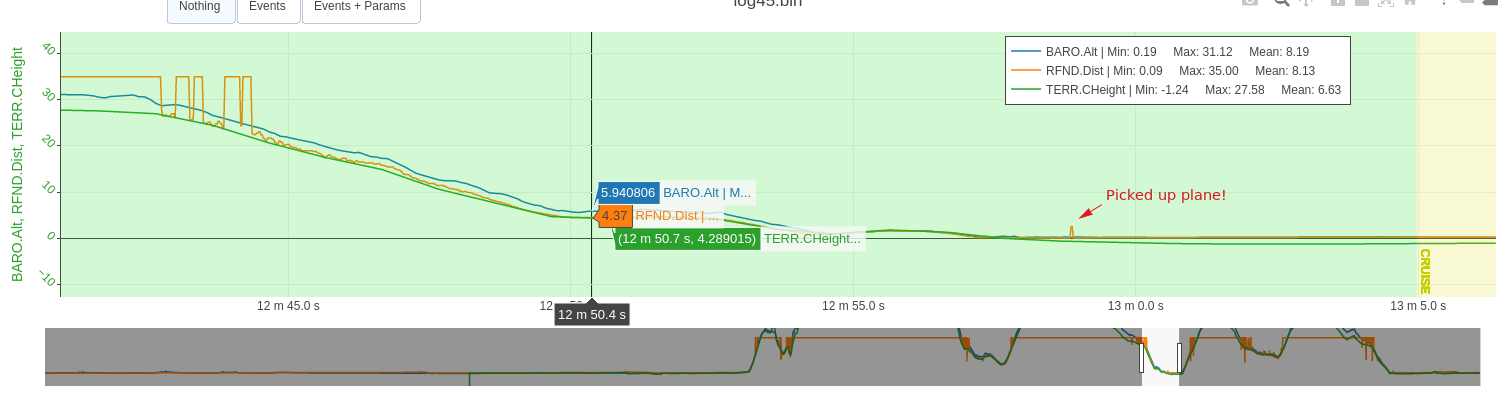
作为飞机自动着陆时使用的高度测距仪:
设置 RNGFND_LANDING = 1 可在 Plane 和 QuadPlane 的着陆阶段使用测距仪。将使用 "向下 "方向的第一个测距仪。
设置 RNGFND1_ORIENT = 25(下降)
设置 RNGFND1_MIN_CM = 50 (.5m)
设置 RNGFND1_MAX_CM = 2200(22 米,因为草地着陆会将可靠的航程降至这个范围,而不是 30 米)
对于 Copter 和 Object Avoidance 应用,需要设置其他/不同的参数。参见 测距仪设置概述.