ST VL53L0X / VL53L1X 激光雷达¶
"这款" VL53L0X 及样品; VL53L1X 激光雷达体积非常小,价格低廉,但射程相对较短(VL53L0X & 为 2 米;VL53L1X 为 4 米)。
图片来源:Pololu.com
备注
对该激光雷达的支持最早出现在 Copter-3.6、Rover-3.3 和 Plane-3.9 中。支持 4m ST VL53L1X 与 Copter-4.0 一起发布。
备注
这种传感器适合在室内使用,但在强光条件下,其范围和精度会明显降低,因此不建议在室外使用。
购买地点¶
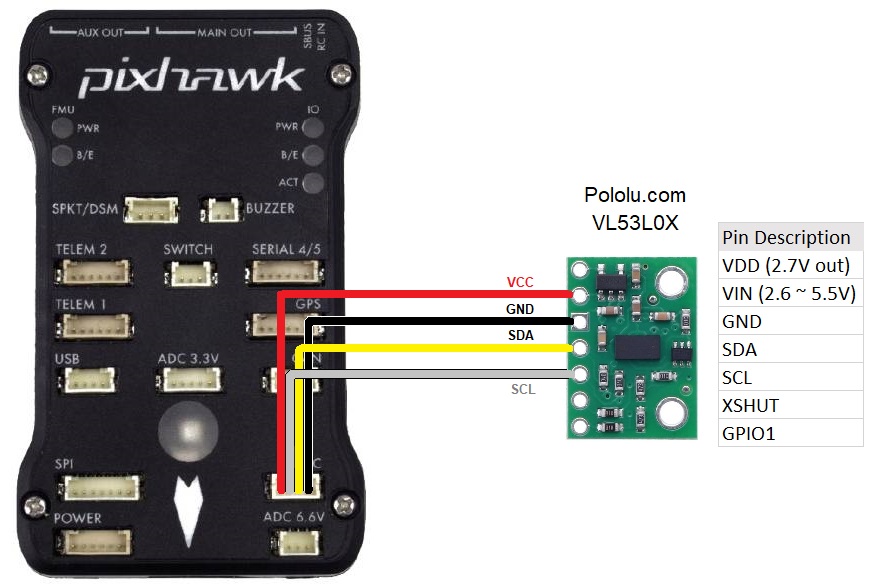
连接(飞行)控制器¶
将激光雷达的 VCC、GND、SDA 和 SCL 线路连接到(飞行)控制器的 I2C 端口,第一个测距仪的连接如下所示。
请按下图所示设置测距仪参数(可使用 Mission Planner地面站 配置/飞行稳定调整 | 完整参数列表 页):
RNGFND1_TYPE = 16 (VL53L0X)
RNGFND1_ADDR = 41(激光雷达的 I2C 地址,十进制)。 传感器的默认 I2C 地址为 0x29 十六进制,十进制为 41。
rngfnd1_scaling = 1
RNGFND1_MIN_CM = 5
RNGFND1_MAX_CM = 120 用于 VL53L0X、 360 用于 VL53L1X。 这是测距仪能够可靠读取的距离(厘米)。
rngfnd1_gndclear = 10 或者更准确地说,是载具着陆时测距仪到地面的距离(厘米)。该值取决于测距仪的安装方式。
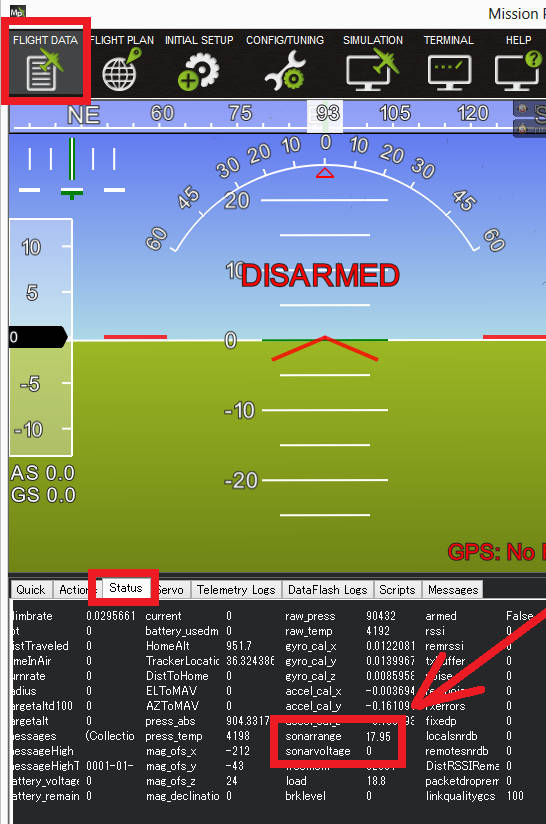
测试传感器¶
传感器读取的距离可以在Mission Planner地面站飞行数据屏幕的状态选项卡中看到。请仔细查看 "sonarrange"。