Mission Planner地面站的配置和调整¶
Mission Planner地面站的这一部分由菜单项 配置
在Mission Planner地面站的顶部,有几个分节。您可以在这些分节中配置控制(飞行)控制器如何控制飞行器的参数。
调整是指调整控制环路中的参数,使飞行器按照您希望的方式运行。其中大部分参数会在首次安装固件时为您设置,但有些参数必须在首次飞行或漫游探险前设置。
进入本部分后,您将看到什么,取决于您是否已连接以及连接的是哪辆车。每个菜单项都会出现一个新界面,下面将讨论每个菜单项,并提供更多细节链接。
规划师¶
如果(飞行)控制器已连接或未连接,您将看到此菜单项。
在这里您可以设置与Mission Planner地面站外观和操作相关的大部分选项。例如启用语音、日志保存位置、要使用的度量单位等。
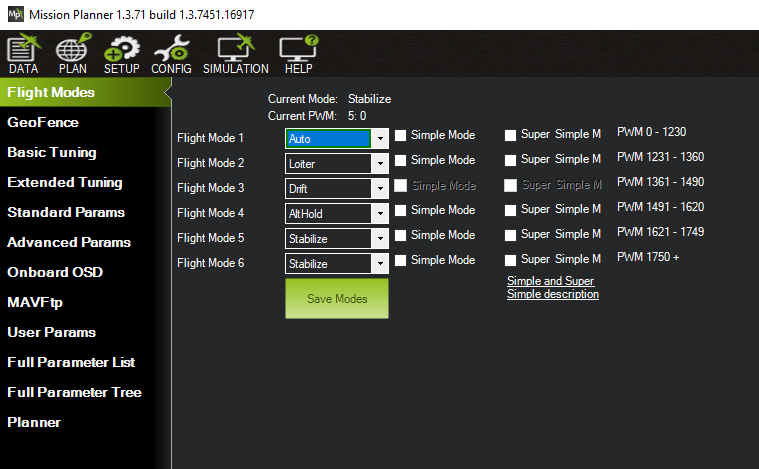
飞行模式¶
您可以在此设置由飞行模式通道控制的 6 种飞行模式。该通道默认为 RC 通道 8(飞机)、通道 5(Copter 和UGV无人车),但也可以使用 FLTMODE_CH 参数,以及 MODE_CH 为 Rover
地理围栏(仅限旋翼飞行器)¶
这样就可以配置各种栅栏/禁区/禁区参数。这些栅栏的坐标通过 PLAN 屏幕进行设置和保存。对于平面和UGV无人车,必须通过下面描述的完整参数屏幕手动设置这些相关的栅栏参数。
基本飞行稳定调整¶
对于所有载具,这将显示该载具姿态和导航控制环路的相关基本调整参数。有关如何调整的解释和说明,请阅读该飞行器的调整部分。
扩展飞行稳定调整(仅限旋翼飞行器)¶
对于 Copter,"基本飞行稳定调整 "屏幕非常简单,便于初学者对滚动和俯仰飞行稳定调整进行一般调整。但该界面与飞机和UGV无人车的基本飞行稳定调整界面类似,显示每个控制环的最常用参数。
标准参数¶
通过该屏幕可以访问用户最常调整的参数,以改变载具在各种应用中的行为。
高级参数¶
通过该屏幕可以访问许多普通用户通常无法调整的参数,但高级用户可以进行调整。
板载 OSD¶
一些(飞行)控制器集成了屏幕显示(OSD)功能。这样就可以轻松设置与这些显示器相关的显示元素、布局和参数。
MAVftp¶
在 4.1 及更高版本的固件中,集成了 FTP(文件传输协议),允许访问 SD 卡(如果(飞行)控制器有)和内部闪存文件系统(请参阅 "文件传输协议")。 ArduPilot 文件系统)通过Mission Planner地面站下载。(不建议使用它下载日志,请使用 DATA(数据)屏幕中的 DataFlash Logs(数据闪存日志)按钮,速度更快)。
用户参数¶
目前,这样可以方便地设置 辅助功能 在 RC 频道上。
完整参数列表¶
显示连接载具的所有参数。允许更改任何参数并保存新值(某些只读参数略有例外)。您还可以将参数保存到文件中并从文件中恢复参数,或者将当前参数与保存的文件进行比较,然后决定将哪些参数(如果有的话)修改到文件列表中。
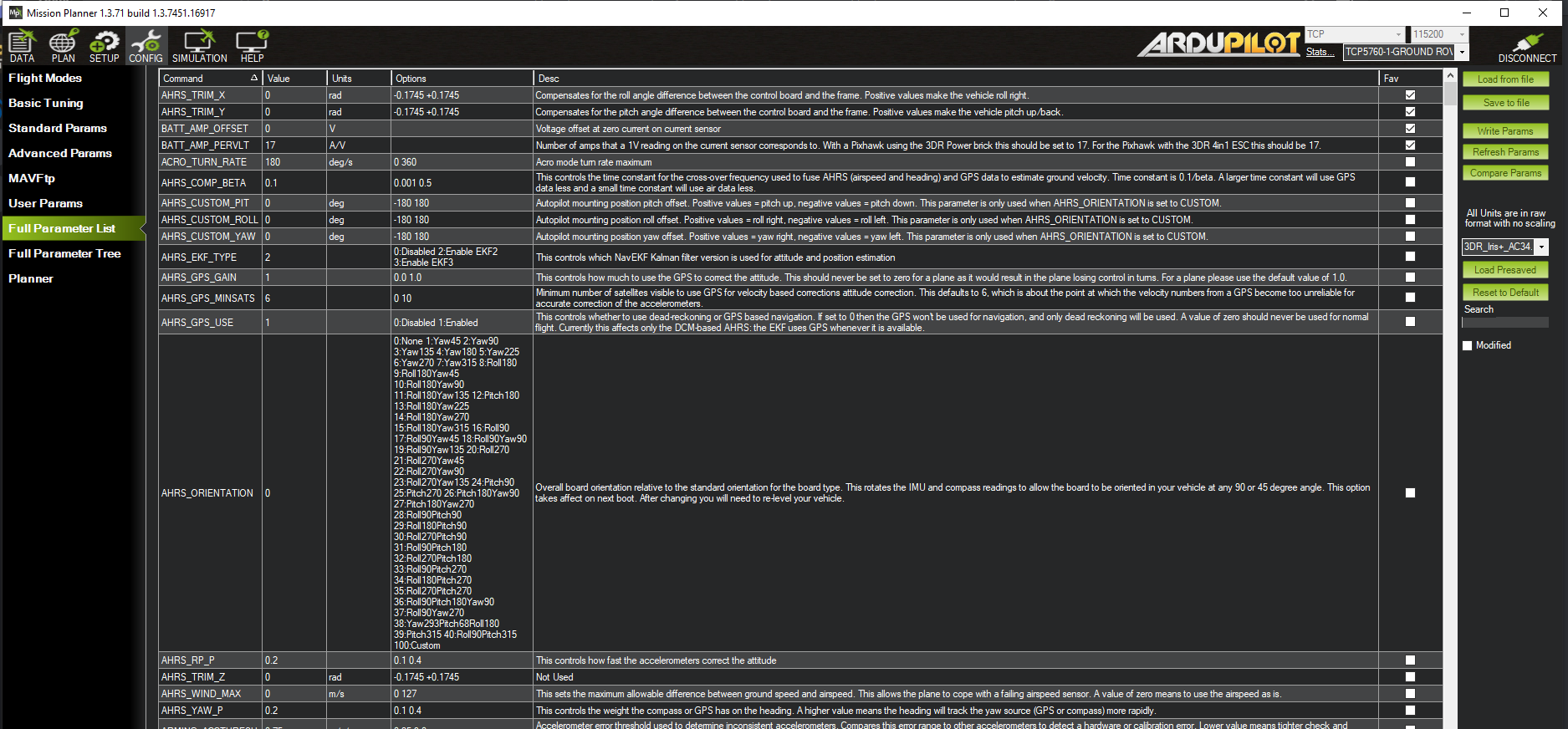
从文件加载:从文件加载保存的参数
保存到文件:将参数保存到文件
写入参数:将该屏幕上修改的参数写入(飞行)控制器
刷新参数:从(飞行)控制器重新载入参数列表。通常需要这样做,以显示刚刚启用的一组参数,例如在平面上启用 Q_ENABLE(垂直起降启用模式)或电池监控器时。
比较参数:将屏幕上的当前参数(包括已修改但尚未保存的参数)与文件进行比较,并可选择将哪些参数修改为该文件的值。
备注
参数比较功能的一个重要方面:选择要比较的保存有参数的文件后,您将看到一个窗口,列出每个不同的参数。此时没有任何更改,但如果您选中某些项目并单击 "继续",这些项目就会在Mission Planner地面站的参数屏幕中更改。然后您需要单击右侧面板中的 "写入参数 "按钮,将更改内容复制到(飞行)控制器中。
加载预存参数:许多常见的载具平台典型参数都可以通过下拉框加载。加载后,可通过 "写入参数 "按钮将其保存到载具中。
重置为默认设置:注意!这将立即将所有参数重置为载具的默认设置。需要通过设置菜单进行重新标定和设置,或者从文件中恢复先前保存的参数。
搜索:可通过名称或包含的描述快速搜索参数。
已修改:只显示当前已修改和未保存的参数。
完整参数树¶
全参数屏幕的树形视图。