参数重置¶
本文介绍了将所有参数重置为默认值的几种方法。如果您想恢复任何现有设置参数,请先将其保存到文件中!
方案 1:使用Mission Planner地面站¶
Mission Planner地面站有一个专门的 重置为默认值 按钮。这将把所有参数重置为载具默认值。
备注
它不会重置 DroneCAN 动态节点地址表。下面列出的其他参数重置方法也将重置该表,以便新设备可以使用被替换设备的先前地址。
将(飞行)控制器连接到 Mission Planner地面站以及 CONFIG | 完整参数列表 或 完整参数树 页面推送 重置为默认值 按钮。
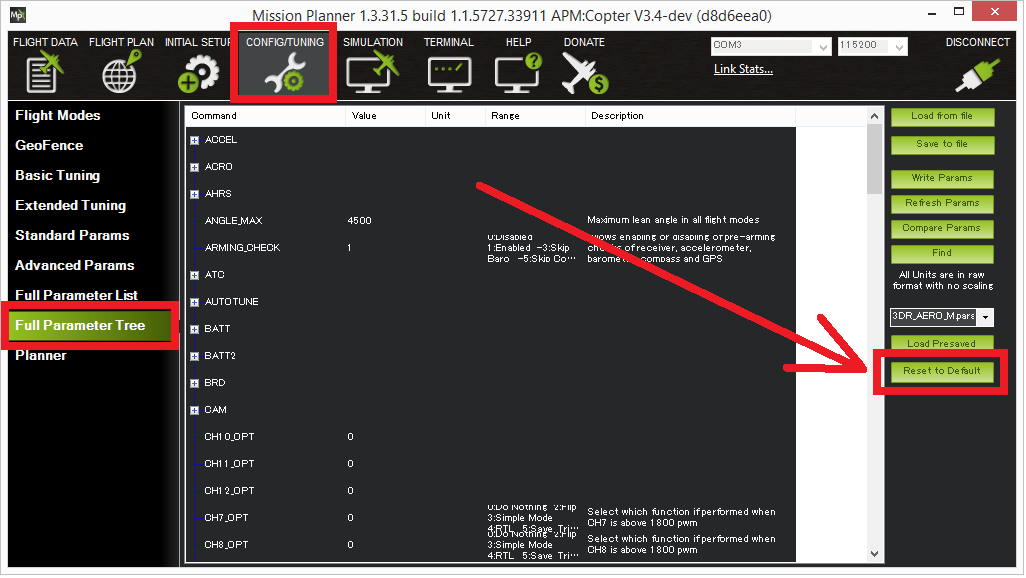
(飞行)控制器将自动重启,将所有参数设置回默认值。
方案 2:更改 FORMAT_VERSION 参数¶
在任何可以写入参数的地面控制站上,您都可以通过设置 格式版本 参数为零。写入参数后,重新启动电路板。
方案 3:加载另一辆车的固件¶
提示
不建议使用这种方法,因为它会耗费不必要的时间。
上传完全不同载具类型的固件(例如,如果您使用的是 Copter,那么现在上传 Rover 固件)。重启电路板并静置 30 秒以清除 EEPROM。然后将原始固件(即 Copter)上传到(飞行)控制器。
重置后恢复校准¶
上述操作还会重置用于指示加速度计和指南针已校准的标志,因此即使您从文件中恢复了旧参数,仍需重复校准。
有两种方法可以恢复这些功能。
警告
只有在确定加速度传感器或罗盘传感器在参数存储到文件后没有发生任何变化的情况下,才可使用此方法。恢复不准确的校准数据会导致系统崩溃!
使用Mission Planner地面站¶
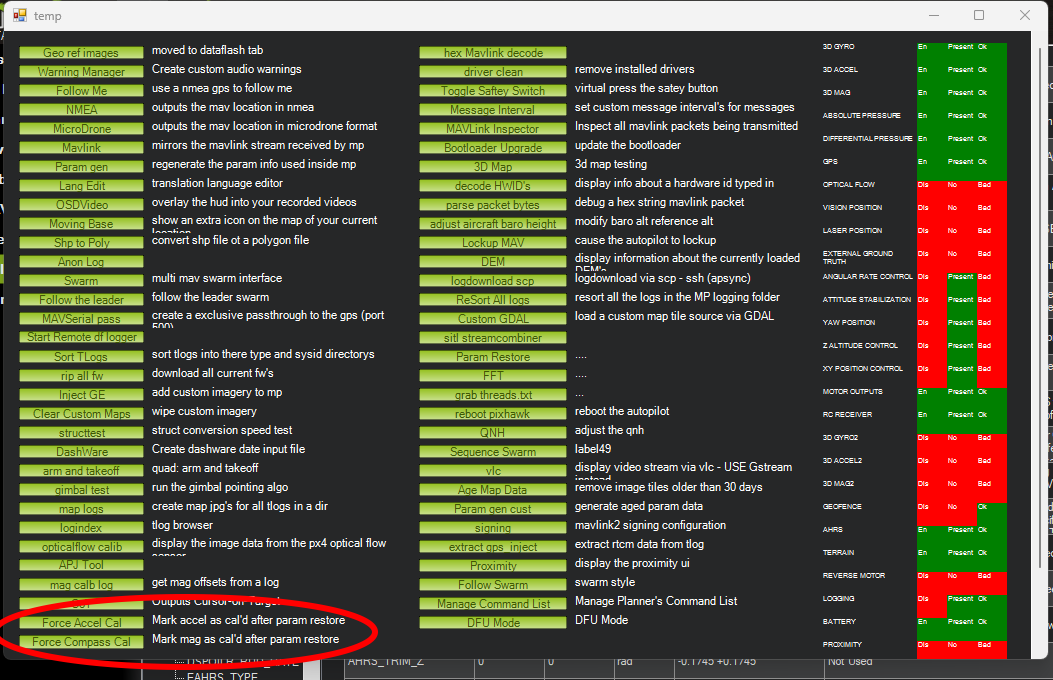
按 ALT+F 进入高级命令。
现在将先前存储的参数(也可作为第一步完成),包括校准参数,恢复到(飞行)控制器并重新启动。现在应该不需要校准就可以上膛了。
按下 "强制加速度校准 "和/或 "强制指南针校准 "以设置标志,表示校准已完成。
使用 MAVProxy¶
只需输入 "forcecal",(飞行)控制器就会强制进入校准状态。请确保已经加载了有效的指南针和 IMU 校准值。