矢量推力¶
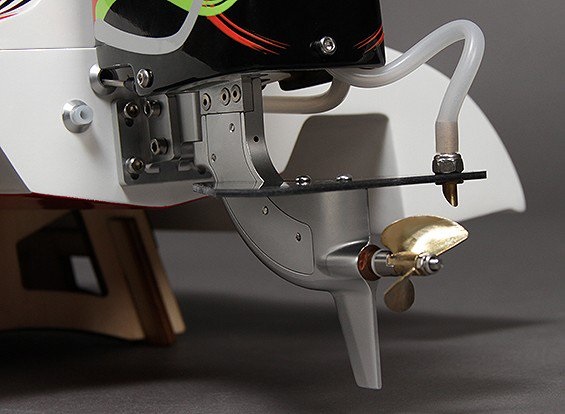
上图为 HobbyKing 的 Sprint F3 船 (链接)
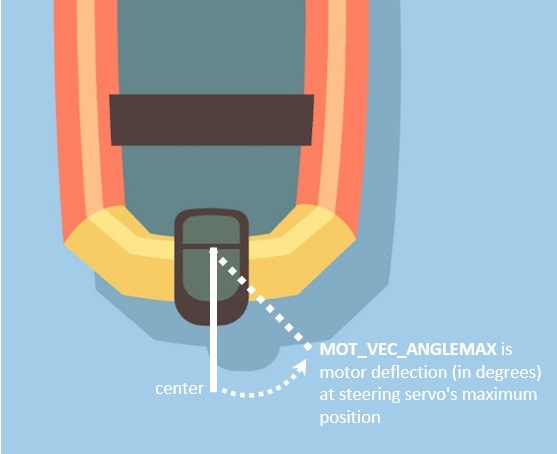
矢量推力 "功能改进了转向控制,可用于 船只 以及使用转向伺服器瞄准电机的气垫船。此功能不适用于方向舵与电机分开控制的载具或船只。
在 Rover-4.1.0(及更高版本)中,通过设置 最大振动角度 是转向伺服器处于最大位置时电机的偏转角度。
在 4.0(及更早版本)中,通过设置 发动机转速基数 参数设置为 10 至 30 之间的数值(通常设置为 20 较好)。该参数指定
油门级别,超过该级别后转向伺服器将向中心缩放。例如,如果设置为 20%,转向响应将在 0% 至 20% 油门之间不受限制,但超过 20% 油门后,随着油门的增加,转向响应将越来越向中心倾斜。
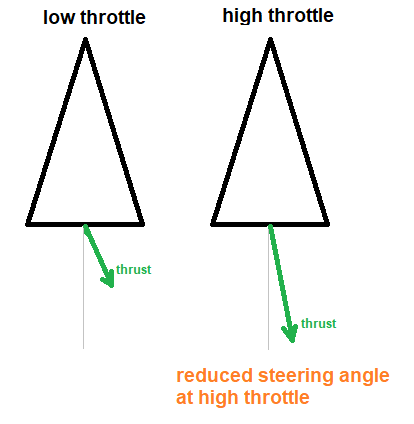
全油门时的最大转向响应,以百分比表示。例如,如果设置为 20%,在全油门时,全转向输入只会导致转向伺服器移动其全范围的 20%。
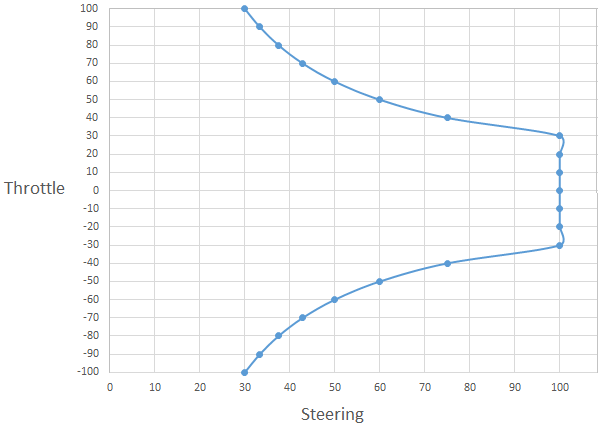
下面的粗略图像显示了转向伺服器的角度必须随着油门的增大而减小,才能获得理想的转向响应。
下图显示了在下列情况下,随着油门的增大,转向响应如何减弱 发动机转速基数 = 30.